PRADIS
СПРАВОЧНИК ПО ЭЛЕМЕНТАМ
ПРОГРАММНЫЙ КОМПЛЕКС ДЛЯ АВТОМАТИЗАЦИИ МОДЕЛИРОВАНИЯ НЕСТАЦИОНАРНЫХ ПРОЦЕССОВ В МЕХАНИЧЕСКИХ СИСТЕМАХ И СИСТЕМАХ ИНОЙ ФИЗИЧЕСКОЙ ПРИРОДЫ
ВЕРСИЯ 4.2
1. МОДЕЛИ ЭЛЕМЕНТОВ, ЗАДАЮЩИХ НАЧАЛЬНЫЕ УСЛОВИЯ
1.2.1. НАЧАЛЬНЫЕ ЗНАЧЕНИЯ СКОРОСТЕЙ
1.2.1.1. НАЧАЛЬНАЯ СКОРОСТЬ СТЕПЕНИ СВОБОДЫ VN
1.2.2. НАЧАЛЬНЫЕ ЗНАЧЕНИЯ ПЕРЕМЕЩЕНИЙ
1.2.2.1. НАЧАЛЬНОЕ ПЕРЕМЕЩЕНИЕ СТЕПЕНИ СВОБОДЫ SN
1.3.1. НАЧАЛЬНЫЕ ЗНАЧЕНИЯ СКОРОСТЕЙ
1.3.1.1. СОГЛАСОВАННЫЕ НАЧАЛЬНЫЕ ЗНАЧЕНИЯ СКОРОСТЕЙ ДЛЯ КРИВОШИПНОГО МЕХАНИЗМА VNKS
1.4.1. Начальные значения скоростей
2.1. Общие сведения об источниках воздействия и принятая их классификация
2.2.1. Модели силовых воздействий
2.2.1.1. Источник постоянного усилия (момента) по одной степени свободы F
2.2.1.2. Источник механической силы (момента), изменяющейся по синусоидальному закону FSIN
2.2.1.4. Источники механической силы (момента), изменяющиеся по трапециевидному закону FTR, FTRC..
2.2.1.8. Источник постоянного усилия, моделирующий действие силы тяжести FG
2.2.2. Модели элементов, задающих перемещения степеней свободы
2.2.2.1. Общие сведения и рекомендации по назначению параметров
2.2.2.2. Источник разности перемещений, изменяющейся по синусоидальному закону SSIN0
2.2.2.3. Источник разности перемещений, задаваемой таблично STABL0
2.2.3. Модели элементов, задающих скорости степеней свободы
2.2.3.1. Общие сведения и рекомендации по назначению параметров
2.2.3.2. Источник постоянной скорости по одной степени свободы VC0
2.2.3.3. Источник разности скоростей, изменяющейся по синусоидальному закону VSIN0
2.2.3.4. Источник разности скоростей, задаваемой таблично VTABL0
2.2.3.5. Источники разности скоростей, изменяющейся по трапециевидному закону VTR0, VTRC0
2.2.4. Модели элементов, задающих ускорения степеней свободы
2.2.4.2. Источник постоянного ускорения по одной степени свободы AC
2.2.4.3. Источник разности ускорений, изменяющейся по синусоидальному закону ASIN
2.2.4.4. Источник разности ускорений, задаваемой таблично ATABL
2.2.4.5. Источники разности ускорений, изменяющейся по трапециевидному закону ATR, ATRC
2.2.5.3. Модель двигателя с линейной механической характеристикой, управляемого потенциалом DVLU
2.3. Пространственные элементы
2.3.1. Модели силовых воздействий
2.3.1.1. Элемент, распределяющий постоянное давление на пространственный треугольник FPRS3D
3.2.1.1. Одномерный инерционный элемент M
3.3.1.1. Плоский инерционный элемент MD
3.3.1.2. Плоский инерционный элемент со смещенным положением центра масс MJ2E
3.4.1.5. Пространственный инерционный элемент со смещенным положением центра масс MJ3E
4.2.1.1. Упругая связь между двумя степенями свободы K
4.2.1.2. Упругая связь с хрупким разрушением BRK
4.2.1.3. Идеальная упруго-пластическая связь, простейший элемент сухого трения KP
4.2.1.4. Нелинейная упругая безразмерная пружина KNL
4.2.2.1. Линейное одномерное вязкое сопротивление MU
4.2.2.2. Вязкое сопротивление с квадратичной зависимостью от скорости MUNL
4.2.2.3. Одномерная упругая связь с характеристикой деформация-усилие, задаваемой таблично SV1KT
4.2.2.4. Одномерная вязкостная связь с задаваемой таблично зависимостью усилия от скорости SV1MUT
4.3.1.1. Линейная упругая безразмерная пружина SV2K
4.3.1.2. Шарнирная связь двух тел, совершающих плоское движение SV2SHR_1
4.4.1.4. Линейный упругий элемент, закрепляющий точку по трем степеням свободы КBASE
4.4.1.5. Универсальный шарнир UNVRS
4.4.1.6. Цилиндрическое соединение двух тел CYLDR
4.4.1.7. Поворотное соединение двух тел ROT1
4.4.1.8. Сферический шарнир ROT3.
4.4.1.9. Переносное соединение двух тел TRANS
4.6.1.2. Перетекание нити через кольцо SRING
4.6.1.3. Инерционная катушка RETRTA
5.1.1.1. Балочный идеально упругий элемент с малыми деформациями BALKA
5.2. Пространственные элементы
5.2.1.1. Растяжимо-сжимаемый стержневой идеально упругий трехмерный элемент STERG
6.2.1.1. Элемент, описывающий контактное взаимодействие точки с окружностью KNTO
6.3.1.1. Элемент, описывающий контактное взаимодействие цилиндра с точкой KNCLT
6.3.1.2. Элемент, описывающий контактное взаимодействие сферы с точкой KNSFT
6.3.1.5. Элемент, описывающий контактное взаимодействие эллипсоида с эллипсоидом KN3EE
6.3.1.6. Элемент, описывающий контактное взаимодействие двух фасетных поверхностей KN3FF
6.3.1.7. Элемент, описывающий контактное взаимодействие эллипсоида с фасетной поверхностью KN3EF
6.4. Приложение: модели сил контактного взаимодействия
7.1.1.1. Передача с потерями момента (силы) в зависимости от заданного к.п.д. REDCT
7.1.1.3. Фрикционная муфта включения MUFTA..
8.1.1. Измерительное оборудование
8.1.1.1. Одноканальный акселерометр со встроенным фильтром низкой частоты AKSEL
1. МОДЕЛИ ЭЛЕМЕНТОВ, ЗАДАЮЩИХ НАЧАЛЬНЫЕ УСЛОВИЯ
1.1. НЕКОТОРЫЕ ОСОБЕННОСТИ ВЫЧИСЛИТЕЛЬНОГО АЛГОРИТМА PRADIS, ОБЕСПЕЧИВАЮЩИЕ ВОЗМОЖНОСТЬ ЗАДАНИЯ НАЧАЛЬНЫХ УСЛОВИЙ
Перед началом интегрирования вычислительным ядром PRADIS выполняются инициализации необходимых массивов. При этом происходит обнуление перемещений и скоростей для всех степеней свободы модели.
Таким образом, если пользователь не предпринял дополнительных действий, то начальные значения скоростей и перемещений предполагаются равными нулю.
В PRADIS имеется группа моделей элементов, которые устанавливают начальные значения скоростей и перемещений для выбранных пользователем степеней свободы. Начальные условия задаются перед непосредственным интегрированием. Считается, что скорость или перемещение, заданные таким образом, приобретаются объектом до нулевого момента времени. По этим степеням свободы объект движется равномерно (т.е., начальное ускорение равно нулю).
Из всего сказанного вытекают следующие ограничения на использование описываемой группы моделей элементов:
1) С помощью этих элементов можно установить значения перемещений и скоростей только в начальный момент времени. Попытка изменить значение начальной скорости или начального перемещения по ходу расчета будет вызывать прерывание расчета с выдачей соответствующих сообщений об ошибке;
2) Попытка с помощью различных программ установить противоречивые начальные значения скоростей или перемещений какого-либо узла приведет к прекращению расчета с выдачей соответствующего сообщения об ошибке;
|
|
|
|
Рис. 1.1. |
Расчетная схема маятника, использованная в примере по установке начальной угловой скорости. |
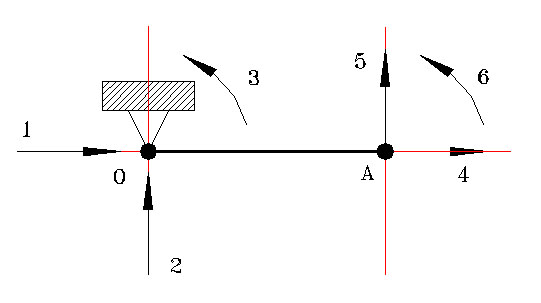
3) Для сложных технических систем установка начальных скоростей отдельных степеней свободы должна происходить согласованно. Например, установив начальную угловую скорость по третьей степени свободы для маятника (рис. 1.1.), но не изменяя начальных скоростей по остальным степеням свободы, получим в начальный момент времени ударный процесс. Он вызван несогласованностью начальных условий для различных степеней свободы. В начальный момент времени участок стержня, прилегающий к опоре, начинает поворот, в то время, как точка A неподвижна. Это вызывает начальную деформацию стержня, которая и является причиной ударного процесса. Текст на входном языке PadiSLang, описывающий математическую модель маятника (рис. 1.1.) с заданной начальной угловой скоростью по третьей степени свободы, равной 1, имеет вид:
$ DATA:
Точка O = 0,0;
Точка A = 1,0
Материал = 1, 0.5, 1.E-5, 1.E-4, 2.E11
Параметры слоя = 2, 0,0, 0, 0
Начальная скорость = 1
$ FRAGMENT : Маятник
# BASE: 1, 2
# STRUCT :
Маятник 'BALKA (1 2 3 4 5 6; Точка O, Точка A, Материал)
Начальная скорость 'VN (3; Начальная скорость)
# OUTPUT:
Угловая скорость 3'V (3; 1); Угловая скорость 6'V (6; 1)
$ SHOW:
Маятник 'LAYER (;Параметры слоя)
$ RUN :
Расчет 'SHTERM (END=0.01, DABSX=1.E-3)
$ PRINT :
Результат 'DISP (;
Угловая скорость 3=(-2,1), Угловая скорость 6=(-1,2))
|
|
|
|
Рис. 1.2. |
Расчетная схема маятника, использованная в примере по установке начальной угловой скорости. |

$ END
Результаты расчета по этой программе приводятся на рис. 1.2. На рисунке видно, что для начального периода колебаний угловые скорости стержня по третьей и шестой степеням свободы изменяются в противофазе. Установившееся значение угловой скорости стержня - 0.06 рад/сек. Если пользователь в данном случае хотел не просто заставить стержень как-то двигаться, а равномерно вращаться с угловой скоростью, равной 1, то он не достиг желаемой цели.
Попытка установить такую же начальную угловую скорость и для шестой степени свободы не решает проблему полностью, хотя размах колебаний уменьшается и установившаяся угловая скорость маятника составляет 0.12 рад/сек. Для безударного задания начальной угловой скорости маятника 1 рад/сек в рассматриваемом примере необходимо задать кроме начальных угловых скоростей по третьей и шестой степеням свободы также начальную вертикальную скорость точки A (по пятой степени свободы). Ее величина получается умножением начальной угловой скорости на длину маятника.
1.2. ОДНОМЕРНЫЕ ЭЛЕМЕНТЫ
1.2.1. НАЧАЛЬНЫЕ ЗНАЧЕНИЯ СКОРОСТЕЙ
1.2.1.1. НАЧАЛЬНАЯ СКОРОСТЬ СТЕПЕНИ СВОБОДЫ VN
Отображаемые свойства:
Задает начальное значение скорости для указанной степени свободы.
Степени свободы:
|
1 - |
поступательная или вращательная, по которой задается начальная скорость. |
Параметры:
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Значение начальной скорости |
м/сек или рад/сек |
-Rlmax... +RLmax |
1.2.2. НАЧАЛЬНЫЕ ЗНАЧЕНИЯ ПЕРЕМЕЩЕНИЙ
1.2.2.1. НАЧАЛЬНОЕ ПЕРЕМЕЩЕНИЕ СТЕПЕНИ СВОБОДЫ SN
Отображаемые свойства:
Задает начальное значение перемещения для указанной степени свободы.
Степени свободы:
|
1 - |
поступательная или вращательная, по которой задается начальное перемещение. |
Параметры:
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Значение начального перемещения |
м или рад |
-Rlmax... +RLmax |
1.3. ДВУХМЕРНЫЕ ЭЛЕМЕНТЫ
1.3.1. НАЧАЛЬНЫЕ ЗНАЧЕНИЯ СКОРОСТЕЙ
1.3.1.1. СОГЛАСОВАННЫЕ НАЧАЛЬНЫЕ ЗНАЧЕНИЯ СКОРОСТЕЙ ДЛЯ КРИВОШИПНОГО МЕХАНИЗМА VNKS
|
|
|
|
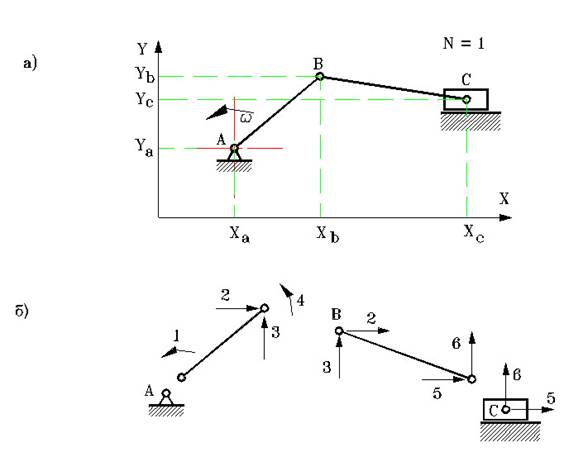
VNKS_1. |
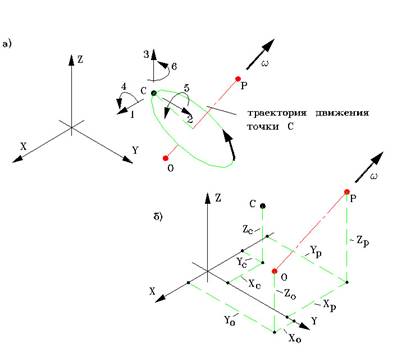
Параметры и степени свободы модели начальной скорости кривошипного механизма. а) Параметры модели: Xa, Ya – начальные координаты точки А; Xb, Yb – начальные координаты точки B; Xc, Yc – начальные координаты точки C; N – порядковый номер координатной оси, параллельно которой движется ползун; ω – начальная угловая скорость кривошипа.
б) Степени свободы модели: 1 – угол поворота кривошипа в точке А; 2 – перемещение точки B по оси X; 3 - перемещение точки B по оси Y; 4 – угол поворота кривошипа в точке B; 5 – перемещение ползуна по оси X; 6 – перемещение ползуна по оси Y; |
Отображаемые свойства:
Задает согласованные с угловой скоростью кривошипа начальные значения скоростей для степеней свободы кривошипного механизма, исходя из условия недеформируемости его звеньев.
Примечание. Здесь и ниже, при описании работы элемента используются обозначения точек и степеней свободы кривошипного механизма такие, как на рис. VNKS_1:
· точка A - неподвижная опора кривошипа;
· точка B - шарнир кривошип-шатун, совершающий плоское движение;
· точка C - шарнир шатун-ползун, перемещающийся параллельно одной из осей координат.
Поворот кривошипа в точке A описывается одной вращательной степенью свободы, движение точки B - двумя поступательными и одной вращательной степенью свободы, движение точки C - двумя поступательными степенями свободы.
Степени свободы:
|
1 - |
вращательная кривошипа (звена AB) со стороны точки A; |
|
2, 3 - |
поступательные точки B по осям OX, OY; |
|
4 - |
вращательная кривошипа (звена AB) со стороны точки B; |
|
5, 6 - |
поступательные точки С по осям OX, OY. |
Параметры:
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2 |
Начальные координаты точки A (Xa; Ya) |
м |
-Rlmax... +RLmax |
|
3,4 |
Начальные координаты точки B (Xb; Yb) |
м |
-Rlmax... +RLmax |
|
5,6 |
Начальные координаты точки C (Xc; Yc) |
м |
-Rlmax... +RLmax |
|
7 |
Порядковый номер координатной оси, параллельно которой перемещается точка C: 1 - по оси X; 2 - по оси Y |
|
1 или 2 |
|
8 |
Начальная угловая скорость кривошипа |
рад/сек |
-Rlmax... +RLmax |
Особенные ситуации:
Существуют начальные положения кривошипного механизма, для которых при заданной скорости кривошипа и исходя из условия недеформируемости звеньев, нельзя определить скорость ползуна. Пример такого случая изображен на рис. VNKS_2. Это возможно только для вырожденных механизмов (т.е., таких, которые не могут без деформации звеньев совершать полный оборот кривошипа).
|
|
|
|
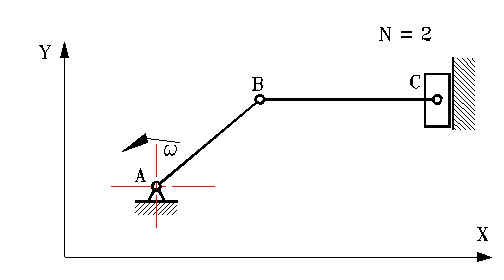
VNKS_2. |
Одно из возможных начальных положений кривошипного механизма, в котором движение не может быть начато без деформации звеньев. |
В случае обнаружения этой ошибки модель элемента VNKS выдает соответствующее сообщение. Выполнение расчета прекращается аварийно. В этой ситуации пользователь должен исправить начальное положение кривошипного механизма так, чтобы он мог начать движение. Если это невозможно, т.е., вам действительно требуется посчитать такой случай, то для задания начального движения механизма нужно использовать другие модели элементов.
1.4. Трехмерные элементы
1.4.1. Начальные значения скоростей
1.4.1.1. Начальные линейная и угловая скорости точки при повороте её вокруг пространственной оси VWN3D
|
|
|
|
VWN3D_1. |
Степени свободы и параметры модели элемента, задающей начальные линейные и угловые скорости точки C, совершающей вращательное движение вокруг оси OP. а) Степени свободы: 1, 2, 3 – поступательные степени свободы точки С в направлении координатных осей X, Y и Z; 4, 5, 6 - вращательные степени свободы точки С вокруг координатных осей X, Y и Z; б) Параметры модели элемента VWN3D: Xc, Yc, Zc – начальные координаты точки C; Xo, Yo, Zo – начальные координаты точки O; Xp, Yp, Zp – начальные координаты точки P; ω – начальная угловая скорость точки C вокруг оси OP. |
Отображаемые свойства:
Задает согласованные начальные скорости по поступательным и вращательным степеням свободы для точки C, совершающей вращательное движение вокруг пространственной оси OP.
Примечание. Здесь и ниже, при описании работы модели элемента используются обозначения точек и степеней свободы, поясняемые рис.VWN3D_1:
- точка C - точка, начальные скорости, движения которой задаются;
- точки O, P - точки, определяющие пространственное положение оси, вокруг которой происходит вращение.
В качестве положительного направления оси вращения принимается направление от точки O к точке P.
Степени свободы
|
1, 2, 3 - |
поступательные степени свободы точки C вдоль координатных осей X, Y и Z; |
|
4, 5, 6 - |
вращательные степени свободы точки C вокруг координатных осей X, Y и Z. |
Параметры:
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки C (XC; YC; ZC) |
м |
- Rlmax... +RLmax |
|
4,5,6 |
Начальные координаты точки O (XO; YO; ZO) |
м |
- Rlmax... +RLmax |
|
7,8,9 |
Начальные координаты точки P (XP; YP; ZP) |
м |
- Rlmax... +RLmax |
|
10 |
Начальная угловая скорость точки С вокруг оси ОР |
рад/сек |
- Rlmax... +RLmax |
Пример использования:
|
|
|
|
VWN3D_2. |
Расчетная схема коленчатого вала, вращающегося с заданной начальной скоростью. |
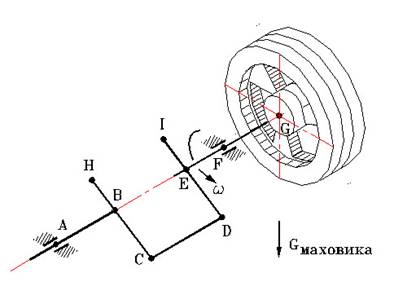
Решается задача анализа вращения коленчатого вала с заданной угловой скоростью (рис. VWN3D_2). Начальные координаты точек A...H:
Точка X Y Z
A 0 0 0
B 0.2 0 0
C 0.2 -0.05 -0.12
D 0.3 -0.05 -0.12
E 0.3 0 0
F 0.5 0 0
G 0.6 0 0
H 0.2 0.03 0.06
I 0.5 0.03 0.06
Вал вращается с угловой скоростью 4 рад/сек в направлении, указанном на рис. VWN3D_2 стрелкой. В точке A вал опирается на шариковый радиальный подшипник, в точке G подшипник шариковый радиально-упорный. Диаметр вала под подшипник - 30 мм. В точке F находится маховик, имеющий момент инерции относительно оси вращения вала 0.3 кг*м2, относительно поперечной оси - 0.12 кг*м2 и массу 22 кг.
С достаточной для практики точностью можно считать, что участки коленвала AB, CD, EG - стальные стержни круглого сечения, средний диаметр которых 32 мм, участки CH и DI - стальные стержни прямоугольного сечения. Высота прямоугольника в направлении, совпадающем с направлением оси вала - 0.03 м, в направлении, перпендекулярном оси вала для участков BC и ED принять ширину стержня 0.1 м, для участков BG и EH - 0.05 м. Силой тяжести, действующей на участки стержней AB и EG, пренебречь, в точках C и D принять величину силы тяжести равной 14 Н, в точках B и E - 21 Н, в точках G и H - 7 Н.
Примечание. Для моделирования стержневых участков конструкции будем использовать пространственные балочные элементы, для моделирования опор - пространственный цилиндрический шарнир, маховик в модели будет представлен точечным пространственным инерционным элементом. Начальные скорости всех элементов конструкции будут задаваться с помощью элемента VWN3D. Для моделирования силы тяжести, действующей на маховик, будем использовать элемент силы тяжести, действующей на массу (FG), для остальных сил тяжести - модель элемента F. После подготовки исходных данных для модели следует проверить, можно ли использовать для моделирования стержневых участков элемент "длинная балка", или в данном случае требуется уже элемент, учитывающий влияние касательных деформаций при изгибе ("короткая балка").
1) Параметры, характеризующие жесткость участков коленчатого вала:
|
|
|
Площадь |
Геометрические моменты инерции сечения, м4 |
||
|
Участок |
Длина |
поперечного |
на изгиб относительно |
на |
|
|
|
|
сечения, м2 |
1ой главной оси |
2ой главной оси |
кручение |
|
AB |
0.2 |
7.1e-4 |
3.9 e-8 |
3.9 e-8 |
7.8 e-8 |
|
BC |
0.13 |
30.0e-4 |
250.0 e-8 |
22.5 e-8 |
72.6 e-8 |
|
CD |
0.1 |
7.1e-4 |
3.9 e-8 |
3.9 e-8 |
7.8 e-8 |
|
DE |
.13 |
0.0e-4 |
250.0 e-8 |
22.5 e-8 |
2.6 e-8 |
|
EF |
.2 |
7.1e-4 |
3.9 e-8 |
3.9 e-8 |
7.8 e-8 |
|
FG |
.1 |
7.1e-4 |
3.9 e-8 |
3.9 e-8 |
7.8 e-8 |
|
BH |
.067 |
5.0e-4 |
31.2 e-8 |
11.2 e-8 |
8.0 e-8 |
|
EI |
.067 |
5.0e-4 |
31.2 e-8 |
11.2 e-8 |
8.0 e-8 |
Первая главная плоскость инерции для участков CH и DI определяется векторами BC и AB (таким образом, 1-й главный момент инерции на изгиб для участков вала BC, DE, BH и EI определяет изгибную жесткость этих стержней при изгибе моментами, вращающими вокруг оси AB). Для всех участков вала в качестве точки, определяющей положение первой главной оси инерции, можно выбрать точку A.
Для всех участков вала выполняется соотношение:
L > 1000 * J изг.
, где L - длина;
J изг. - момент инерции на изгиб.
Поэтому для этой задачи достаточно использовать элемент BAL3DJ ("длинная балка").
Плотность стали принимаем равной 7800 кг/м3 , модуль упругости - 2.e11 Па, коэффициент Пуассона - 0.3.
2) Параметры, характеризующие жесткость подшипников.
Для опор выбираем подшипники особо легкой серии. В опоре A - подшипник N 106, в опоре F - N 46106 [3].
Справочные данные для этих подшипников сведены в таблицу:
|
Опора |
Номинальная статическая грузоподъёмность, Н |
Количество шариков |
Диаметр шарика, м |
Угол контакта, град. |
|
A |
5 040 |
11 |
7.1 e-3 |
0 |
|
F |
8 030 |
18 |
7.1 e-3 |
26 |
Радиальную жесткость радиального и радиально-упорного шарикового подшипников определяем по зависимости [6]:
![]()
, где Wо - средняя нагрузка на подшипник;
Z - общее количество тел качения;
DШ - диаметр шарика;
f - угол контакта.
Осевую жесткость радиально-упорного подшипника будем определять, соответственно, по зависимости:
![]()
Модели пространственных шарниров, используемых в рассматриваемой задаче, имеют линейные жесткостные характеристики. Поэтому коэффициент жесткости для первого расчета может быть принят равным величине, соответствующей жесткости при номинальной статической нагрузке. В дальнейшем жесткость подшипников может быть уточнена.
Жесткость подшипника в опоре A:
![]()
Радиальная жесткость подшипника в опоре F:
![]()
Осевая жесткость подшипника в опоре F:
![]()
3) Параметры элемента VWN3D.
Начальная угловая скорость, задаваемая элементом, 4 рад/сек. Если задавать положительное значение угловой скорости, то направление оси вращения следует принимать от F к A (соответственно, если принимать направление оси вращения от A к F, то для того, чтобы вал вращался в направлении, показанном на рис. VWN3D_2, значение угловой скорости следует задавать отрицательным).
Текст модели коленвала на входном языке PRADIS:
$ DATA :
Точка A = 0, 0, 0
Точка B = 0.2, 0, 0
Точка C = 0.2, -0.05, -0.12
Точка D = 0.3, -0.05, -0.12
Точка E = 0.3, 0, 0
Точка F = 0.5, 0, 0
Точка G = 0.6, 0, 0
Точка H = 0.2, 0.03, 0.06
Точка I = 0.5, 0.03, 0.06
Сталь = 2.e11, 0.3, 7800
Участок AB = 3.9 e-8, 3.9 e-8 , 7.8 e-8, 7.1e-4
Участок BC =250.0 e-8, 22.5 e-8 ,72.6 e-8, 30.0e-4
Участок CD = 3.9 e-8, 3.9 e-8 , 7.8 e-8, 7.1e-4
Участок DE =250.0 e-8, 22.5 e-8 ,72.6 e-8, 30.0e-4
Участок EF = 3.9 e-8, 3.9 e-8 , 7.8 e-8, 7.1e-4
Участок FG = 3.9 e-8, 3.9 e-8 , 7.8 e-8, 7.1e-4
Участок BH = 31.2 e-8, 11.2 e-8 ,28.0 e-8, 15.0e-4
Участок EI = 31.2 e-8, 11.2 e-8 ,28.0 e-8, 15.0e-4
Жесткость опоры A = 0, 1.24e8, 0, 0;
Жесткость опоры F = 1.53e8, 1.94e8, 0, 0;
Начальная угловая скорость = 4;
Ось вращения = Точка F, Точка A;
Масса маховика = 22
Моменты инерции маховика = 0.12, 0.12, 0.3
Параметры изображения = 0.6, Точка B,
-0.5, -0.5, 0.5,
0.5, -0.5, 0, 0
$ FRAGMENT :
# BASE : 100, 101, 102, 103, 104, 105
# STRUCT :
{ Коленвал }
Участок AB 'BAL3DJ(1 2 3 4 5 6 7 8 9 10 11 12;
Точка A,Точка B,Точка A,Участок AB,Сталь)
Участок BC 'BAL3DJ(7 8 9 10 11 12 13 14 15 16 17 18;
Точка B,Точка C,Точка A,Участок BC,Сталь)
Участок CD 'BAL3DJ(13 14 15 16 17 18 19 20 21 22 23 24;
Точка C,Точка D,Точка A,Участок CD,Сталь)
Участок DE 'BAL3DJ(19 20 21 22 23 24 25 26 27 28 29 30;
Точка D,Точка E,Точка A,Участок DE,Сталь)
Участок EF 'BAL3DJ(25 26 27 28 29 30 31 32 33 34 35 36;
Точка E,Точка F,Точка A,Участок EF,Сталь)
Участок FG 'BAL3DJ(31 32 33 34 35 36 37 38 39 40 41 42;
Точка F,Точка G,Точка A,Участок FG,Сталь)
Участок BH 'BAL3DJ( 7 8 9 10 11 12 43 44 45 46 47 48;
Точка B,Точка H,Точка A,Участок BH,Сталь)
Участок EI 'BAL3DJ(25 26 27 28 29 30 49 50 51 52 53 54;
Точка E,Точка I,Точка A,Участок EI,Сталь)
{ Опоры }
Опора A 'SH3CP(100 101 102 103 104 105 1 2 3 4 5 6;
Точка A, Точка B, Жесткость опоры A)
Опора F 'SH3CP(100 101 102 103 104 105 31 32 33 34 35 36;
Точка E, Точка F, Жесткость опоры F)
{ Маховик }
Маховик 'MJ3D ( 49 50 51 52 53 54;
Точка I,Точка F,Точка F,
Масса маховика,
Моменты инерции маховика)
{ Элементы, задающие начальную скорость }
Начальная скорость точки A ' VWN3D ( 1 2 3 4 5 6;
Точка A, Ось вращения,
Начальная угловая скорость)
Начальная скорость точки B ' VWN3D ( 7 8 9 10 11 12;
Точка B, Ось вращения,
Начальная угловая скорость)
Начальная скорость точки C ' VWN3D (13 14 15 16 17 18;
Точка C, Ось вращения,
Начальная угловая скорость)
Начальная скорость точки D ' VWN3D (19 20 21 22 23 24;
Точка D, Ось вращения,
Начальная угловая скорость)
Начальная скорость точки E ' VWN3D (25 26 27 28 29 30;
Точка E, Ось вращения,
Начальная угловая скорость)
Начальная скорость точки F ' VWN3D (31 32 33 34 35 36;
Точка F, Ось вращения,
Начальная угловая скорость)
Начальная скорость точки G ' VWN3D (37 38 39 40 41 42;
Точка G, Ось вращения,
Начальная угловая скорость)
Начальная скорость точки H ' VWN3D (43 44 45 46 47 48;
Точка A, Ось вращения,
Начальная угловая скорость)
Начальная скорость точки I ' VWN3D (49 50 51 52 53 54;
Точка I, Ось вращения,
Начальная угловая скорость)
# OUTPUT :
Радиальная реакция в точке A'X (W:Опора A(6); 1)
Радиальная реакция в точке F'X (W:Опора F(6); 1)
Осевая реакция в точке F'X (W:Опора F(5); 1)
$ SHOW :
Изображение коленвала 'SHOW (; Параметры изображения)
2. Воздействия
2.1. Общие сведения об источниках воздействия и принятая их классификация
Элементы, описанные в настоящем разделе, служат для задания внешнего воздействия на анализируемый объект. Все эти элементы являются источниками усилия (момента). Текущая величина прикладываемого к объекту усилия может определяться текущим временем, заданной характеристикой элемента и другими факторами.
Модели элементов, реализующих воздействия на анализируемый объект, можно условно разделить на три группы.
К первой группе относятся элементы, реализующие заданную зависимость усилия от времени F(t). Величина усилия, генерируемого этими элементами, не зависит от каких-либо других факторов. В каждый момент времени элемент генерирует точно ту величину усилия, которая определяется зависимостью F(t).
Ко второй группе относятся источники кинематических воздействий. Эти элементы генерируют силу или момент, направленные на поддержание заданного пользователем закона изменения перемещения, скорости или ускорения. Текущая величина генерируемого элементом усилия зависит от нескольких факторов. Во-первых, это заданный пользователем закон изменения какой-либо кинематической переменной от времени. Во-вторых, на величину усилия влияет текущее фактическое значение управляемой кинематической переменной и величина коэффициента пропорциональности между усилием и отклонением фактического значения кинематической переменной от заданного.
Например, если в текущий момент времени разница между скоростями по каким-либо двум степеням свободы элемента должна быть DV(t) , фактическое значение этой величины - DVf, а значение коэффициента пропорциональности - m, то в рассматриваемый момент времени элемент будет генерировать усилие:
F = m * (DV(t) - DVf)
направленное таким образом, чтобы уничтожить разницу между фактическим и требуемым значением скорости.
Таким образом, элементы, реализующие кинематические воздействия, поддерживают заданное воздействие не точно, а с каким-то приближением. Чем выше значение коэффициента пропорциональности между отклонением кинематической переменной от заданного значения и силой, тем точнее элемент будет отрабатывать заданную зависимость перемещения, скорости или ускорения от времени.
У всех моделей элементов, реализующих кинематические воздействия, имеется рабочий вектор, состоящий, как минимум, из двух элементов. Первым элементом рабочего вектора является идеальное (точно соответствующее заданной пользователем форме импульса) значение перемещения, скорости или ускорения. Вторым элементом рабочего вектора является разница между текущим значением кинематической переменной для заданной степени свободы, и значением, заданным пользователем.
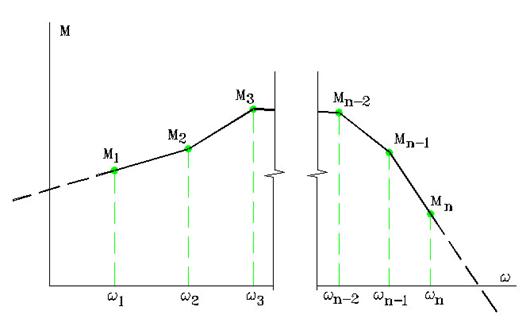
К третьей группе источников воздействия в этом справочнике отнесены "двигатели", т.е., источники усилий (моментов), у которых текущая величина генерируемого усилия определяется заданной пользователем механической характеристикой (зависимостью усилия или момента от скорости).
В библиотеке моделей элементов комплекса PRADIS есть источники силовых и кинематических воздействий нескольких стандартных форм:
· источники постоянного воздействия (F, AC, VC0);
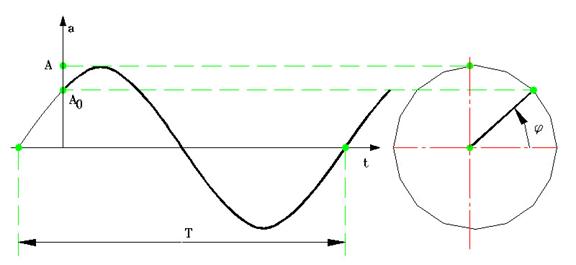
· источники воздействия синусоидальной формы (FSIN, ASIN, VSIN0, SSIN0, см. рис.2.1.);
|
|
|
|
Рис 2.1.. |
Параметры модели элемента, задающего синусоидальное воздействие: A – амплитуда воздействия; T – период; φ – начальная фаза. ПРИМЕЧАНИЕ. При заданной начальной фазе уровень начального воздействия A0 определяется согласно этому рисунку. |
· источники импульса, форма которого задается таблично в зависимости от времени (FTABL, ATABL, VTABL0, STABL0, см. рис.2.2.);
|
|
|
|
Рис 2.2. |
Параметры модели элемента, задающего табличную зависимость внешнего воздействия от времени, каждая точка графика определяется парой чисел t – Ai. |
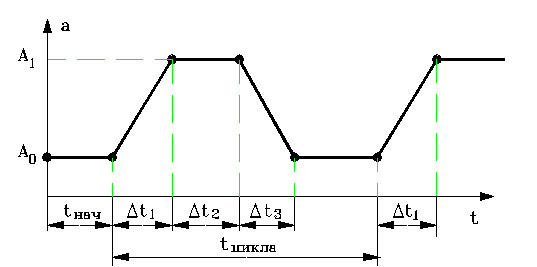
· источники импульса трапециевидной формы (FTR, ATR, VTR0, STR0, см. рис.2.3.);
· источники импульсов трапециевидной формы, повторяющихся циклически (FTRC, ATRC, VTRC0, STRC0, см. рис.2.3.).
|
|
|
|
Рис 2.3. |
Параметры элементов, задающих трапециидальный импульс внешнего воздействия: A0 – начальный уровень воздействия; A1 – уровень воздействия для вершины импульса; tнач – момент времени начала роста импульса; Δt1 – продолжительность переднего фронта импульса; Δt2 – продолжительность горизонтального участка; Δt3 – продолжительность заднего фронта импульса; tцикла – продолжительность цикла (для FTRC, ATRC, VTRC, STRC) |
Импульс любой произвольной формы можно получить суммированием воздействия от нескольких источников. Способы суммирования для силового и кинематического воздействий различаются.
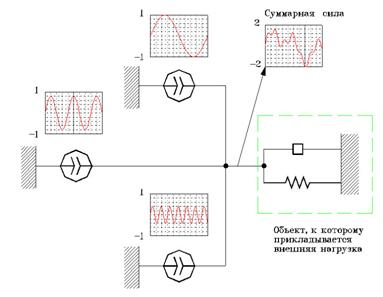
Рассмотрим пример, в котором нужно получить импульс воздействия в виде суммы трех синусоидальных импульсов. В случае, если суммируются силовые воздействия, то модели элементов FSIN присоединяются соответствующими ветвями к нужной степени свободы объекта (т.е., имеет место параллельное подключение источников усилия). Способ суммирования силовых воздействий иллюстрируется рис.2.4.
|
|
|
|
Рис 2.4. |
Суммирование силовых воздействий. |
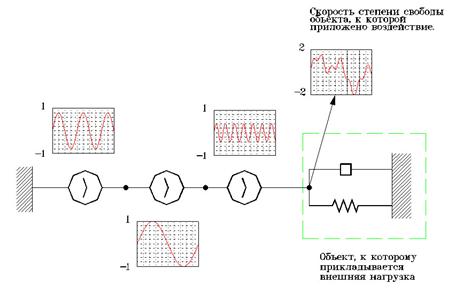
В случае, если пользователю нужно суммировать кинематические воздействия (например, скорости), то модели источников воздействия (в данном случае - VSIN0 ) подключаются последовательно. Этот способ суммирования внешних воздействий представлен на рис. 2.5. При этом в анализируемом объекте могут появиться степени свободы с неопределенными инерционными характеристиками (это произойдет, если соединяемые элементы - источники скорости или перемещения). Для степеней свободы с неопределенными инерционными характеристиками возможно скачкообразное изменение скорости, что является нежелательным явлением. Если в вашей расчетной практике встретился такой случай, постарайтесь определить инерционные характеристики вновь возникших степеней свободы. Как правило, элементы, задающие законы изменений скоростей или перемещений в реальном объекте, имеют массы и моменты инерции, которые можно приближенно распределить по степеням свободы.
Если задать инерционные характеристики не удается, нужно не упускать из виду, что при расчете объектов, имеющих такие степени свободы, обычно используется ключевой параметр программы интегрирования CONTROL.
|
|
|
|
Рис 2.5. |
Суммирование кинематических воздействий. |
Для источников воздействий, задающих определенную форму импульса в зависимости от времени, важной является задача точного воспроизведения требуемой формы импульса. Можно выделить два источника искажений задаваемой формы импульса.
Во-первых, для источников кинематических воздействий форма задаваемого импульса может искажаться из-за недостаточной величины коэффициента пропорциональности между усилием и отклонением фактического значения управляемой переменной от заданного.
В качестве примера рассмотрим модель простой системы, в которой скорость точечного инерционного элемента задается в виде импульса трапециевидной формы. Выходными переменными являются текущее значение скорости, значение скорости, заданное пользователем и разница между текущим и заданным значением скорости:
$ DATA:
Масса = 1;
Скорость = 0, 1, 0.1, 0.1, 0.1;
MU = 10
$ FRAGMENT:
# BASE: 1
# STRUCT:
Масса 'M (2 1; Масса)
Источник скорости 'VTR (2 1; Скорость, MU)
# OUTPUT:
Фактическая скорость'V (2;1)
Заданная скорость 'X (W:Источник скорости(1);1)
Погрешность задания скорости 'X
(W:Источник скорости(2);1)
$ RUN:
Тестовый расчет 'SHTERM (END=1)
$ PRINT :
Изменение скорости 'DISP (END=1;
Фактическая скорость = (-1, 1),
Заданная скорость = (-1, 1),
Погрешность задания скорости = (-1, 1))
$ END
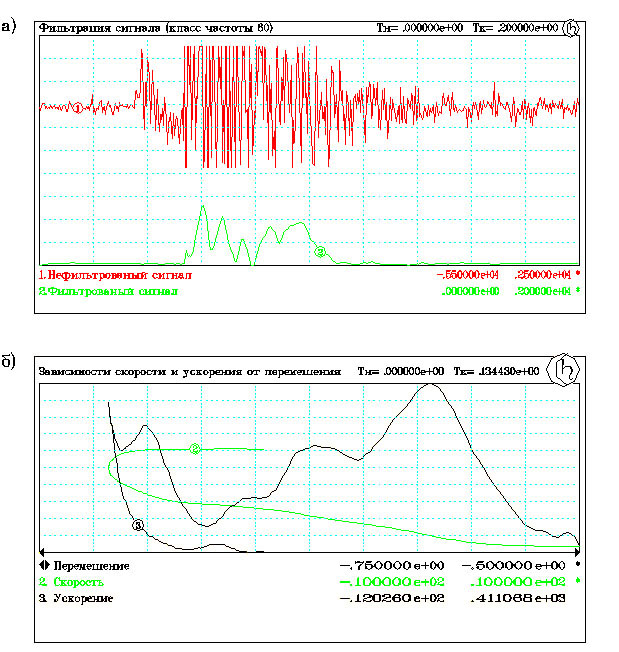
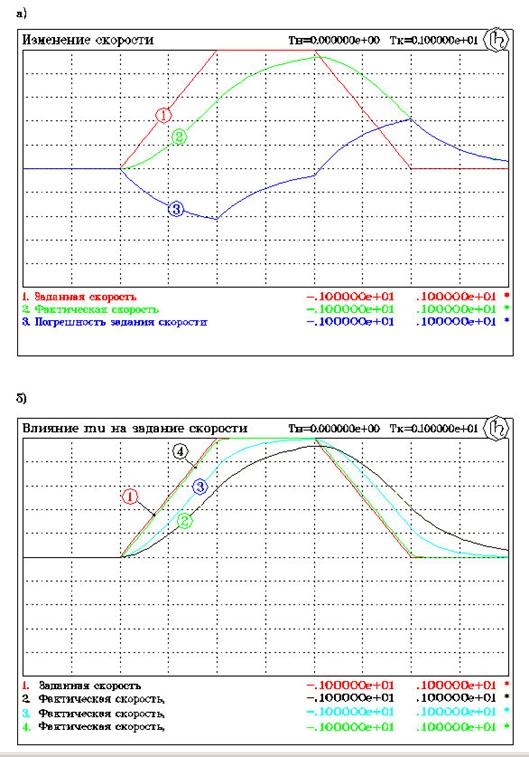
Результаты расчета приведены на рис. 2.6.а. Видно, что форма полученного здесь импульса скорости заметно отличается от трапециевидной. Рис.2.6.б. иллюстрирует влияние коэффициента пропорциональности m на точность отработки заданного пользователем закона изменения скорости в рассматриваемом примере.
|
|
|
|
Рис 2.6. |
Задание скорости точечного инерционного элемента с помощью источника импульса скорости трапециевидной формы: а) масса элемента – 1 кг, μ – источник импульса – 10 Н*м/сек б) влияние mu на точность воспроизведения формы импульса (масса разгоняемого элемента та же). |
Во-вторых, одним из возможных источников искажения формы импульса может являться большая величина шага интегрирования (см. рис.2.7.а.). На этом рисунке изображен случай, когда выбор шага интегрирования производится только из соображений локальной точности и никак не учитывает особенности модели элемента, генерирующей заданное воздействие трапециевидной формы. Тогда соседние моменты времени, в которые происходит обращение к модели элемента, могут находиться на соседних участках силовой характеристики, что приводит к "срезанию углов", искажению наклона фронта импульса и погрешностям в задании его длины. Если же величина шага интегрирования будет превышать длину импульса, то рабочая программа может вообще не "заметить" и проскочить его.
Похожая проблема может возникнуть и в случае, когда входное воздействие имеет форму синусоиды. Слишком большая величина шага интегрирования может привести к тому, что источник воздействия не будет отрабатывать заданную величину амплитуды воздействия и искажать его форму (рис. 2.7.б).
|
|
|
|
Рис 2.7. |
Возможное искажение формы импульса при большом шаге интегрирования. I – форма импульса, заданная пользователем; II – искаженная форма импульса. а) импульс трапециевидной формы; б) синусоидальный импульс. |

Поэтому модели элементов, задающих силовые и кинематические
воздействия, рекомендуют рабочей программе определенную величину шага интегрирования.
Модели элементов, реализующих кусочно-линейные воздействия в зависимости от
времени, рекомендуют такую величину шага интегрирования, чтобы точно попадать в
точки излома заданной зависимости. Для источников воздействия синусоидальной
формы рекомендуемый элементом шаг интегрирования обеспечивает обращение к нему,
как минимум, в моменты времени, для которых аргумент синуса кратен ![]() /8.
/8.
Если расчет ведется с заданным пользователем значением ключевого параметра программы интегрирования IGNORE=1, то рекомендации моделей элементов по выбору очередного шага интегрирования учитываться не будут. В этом случае пользователь должен быть готов к возможным искажениям формы воздействий, связанных с величиной шага интегрирования.
И еще один момент, который является, по нашему мнению, важным. Необходимо иметь в виду, что генерируемое элементом начальное усилие прикладывается к объекту мгновенно в начальный момент времени. Поэтому, даже если начальное воздействие задается в виде источника постоянной силы, это вызовет в начальный момент времени ударный процесс (считается, что в промежуток времени, предшествовавший нулевому моменту времени, на объект не действовало никаких усилий). Такого рода удары могут вызывать в рассчитываемом объекте различные переходные процессы, в том числе колебания.
Еще более серьезные последствия для рассчитываемого объекта могут вызвать удары, определяемые начальными перемещениями или скоростями по той или иной степени свободы объекта. Поэтому многие элементы, задающие кинематические воздействия, осуществляют проверку согласованности начальных условий для соответствующей степени свободы (начальная скорость, начальное перемещение) и начальных значений скорости (перемещения), задаваемых элементом. Какие из элементов осуществляют такую проверку, сказано при описании соответствующего элемента.
Если начальные условия для какой-то степени свободы объекта не соответствуют задаваемому закону изменения скорости или перемещения, происходит аварийное прерывание расчета с выдачей сообщения о попытке повторной инициализации начального значения потенциальной переменной.
Поэтому, если требуемый закон изменения перемещения (скорости)
предполагает ненулевое начальное значение перемещения (скорости), то совместно
с требуемым источником кинематического воздействия для соответствующей степени
свободы объекта нужно задать начальные условия с помощью одной из моделей
элементов SN, VN и т.д.. В некоторых случаях трудно вычислить точное начальное
значение скорости или перемещения, которое требуется передать в качестве
параметра модели элемента, задающей начальные условия. Например, для синусоиды
с начальной фазой 60 градусов начальное значение воздействия будет
пропорционально ![]() , т.е., не выражается
конечной десятичной дробью. Поэтому все элементы, задающие законы изменения
скоростей или перемещений, производят сравнения задаваемого закона с начальными
условиями следующим образом:
, т.е., не выражается
конечной десятичной дробью. Поэтому все элементы, задающие законы изменения
скоростей или перемещений, производят сравнения задаваемого закона с начальными
условиями следующим образом:
· вычисляется разница между начальным значением скорости (перемещения), определяемой заданным законом ее изменения, с заданными начальными условиями;
· полученная разница умножается на коэффициент пропорциональности между отклонением перемещения (скорости) и генерируемым усилием, что дает величину усилия, генерируемого элементом в начальный момент времени;
· начальное значение усилия сравнивается с заданным значением ключевого параметра DABSI. Если оно превышает значение ключевого параметра, то считается, что задаваемое значение скорости или перемещения не соответствует начальным условиям.
2.2. Одномерные элементы
2.2.1. Модели силовых воздействий
2.2.1.1. Источник постоянного усилия (момента) по одной степени свободы F
Отображаемые свойства
Задает величину постоянного усилия или момента, действующего по одной степени свободы объекта.
Степени cвободы
|
1 - |
поступательная или вращательная, по которой действует задаваемое усилие или момент. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Величина действующего усилия или момента |
Н или Н*м |
-Rlmax... +Rlmax |
2.2.1.2. Источник механической силы (момента), изменяющейся по синусоидальному закону FSIN
Отображаемые свойства
Задает силовое воздействие на объект, изменяющееся по синусоидальному закону с заданными пользователем параметрами. Начальное значение усилия определяется параметром "начальная фаза" (см. рис. 2.1.).
Степени свободы
|
1 - |
поступательная или вращательная, по которой действует задаваемое усилие или момент; |
|
2 - |
степень свободы, на которую элемент "опирается"; по этой степени свободы элемента будет действовать усилие противоположного знака. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Амплитудное значение усилия или момента |
Н или Н*м |
- RLmax... +RLmax |
|
2 |
Период изменения силового фактора |
сек |
Smin.... +Rlmax |
|
3 |
Начальная фаза |
град |
- RLmax... +Rlmax |
2.2.1.3. Источник механической силы (момента), для которого задается табличная зависимость силового фактора от времени FTABL
Отображаемые свойства
Задает кусочно-линейный импульс силового воздействия, определяемый произвольным количеством точек (рис. 2.2.). Для описания каждой точки используется два параметра: 1 - момент времени; 2 - величина силы. Таким образом, для этого элемента должно быть задано четное количество параметров. Задаваемые точки должны быть упорядочены по возрастанию времени.
Если начальный момент времени, заданный в таблице, превышает текущее модельное время, или текущее модельное время вышло за промежуток времени, на протяжении которого определена таблица усилий, текущее усилие определяется экстраполяцией крайних отрезков, как это показано штриховой линией на рис. 2.2. В связи с этим две первые и две последние точки характеристики не должны определять разные значения усилия для одного и того же момента времени. Для элемента должно быть задано не менее 2х точек табличной зависимости силы от времени.
Степени свободы
|
1 - |
поступательная или вращательная, по которой действует задаваемое усилие или момент; |
|
2 - |
степень свободы, на которую элемент "опирается"; по этой степени свободы элемента будет действовать усилие противоположного знака. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
t1 - момент времени, определяющий первую точку зависимости усилия от времени |
сек |
0... +RLmax |
|
2 |
F1 - сила (момент) для момента времени t1 |
Н или Н*м |
- RLmax... +RLmax |
|
|
. . . . . |
|
|
|
2*i-1 |
ti - момент времени, определяющий i-ю точку зависимости усилия от времени |
сек |
ti -1 ... +RLmax |
|
2*i |
Fi - сила (момент) для момента времени ti |
Н или Н*м |
- RLmax... +RLmax |
|
|
. . . . . |
|
|
|
2*n-1 |
tn - момент времени, определяющий n-ю точку зависимости усилия от времени |
сек |
tn -1 ... +Rlmax |
|
2*n |
Fn - cила (момент) для момента времени tn |
Н или Н*м |
- RLmax... +Rlmax |
2.2.1.4. Источники механической силы (момента), изменяющиеся по трапециевидному закону FTR, FTRC
Отображаемые свойства
Задает импульс силового воздействия на объект, изменяющийся по трапециевидному закону (рис. 2.3.). Элемент FTR применяется для задания однократного, а FTRC - циклически повторяющегося воздействия.
Степени свободы
|
1 - |
поступательная или вращательная, по которой действует задаваемое усилие или момент; |
|
2 - |
степень свободы, на которую элемент "опирается"; по этой степени свободы элемента будет действовать усилие противоположного знака. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Начальный уровень силы (момента) |
Н или Н*м |
- RLmax... +Rlmax |
|
2 |
Уровень силы (момента) для вершины импульса |
Н или Н*м |
- RLmax... +RLmax |
|
3 |
Момент времени начала роста импульса |
сек |
0... +Rlmax |
|
4 |
Продолжительность переднего фронта импульса |
сек |
0... +RLmax |
|
5 |
Продолжительность вершины импульса |
сек |
0... +Rlmax |
|
6 |
Продолжительность заднего фронта импульса |
сек |
0... +Rlmax |
|
7 (только для FTRC) |
Продолжительность цикла |
сек |
(PAR(4)+ PAR(5)+ PAR(6)+ (RLmin... RLmax) |
2.2.1.5. Источник механической силы (момента), для которого задается табличная зависимость силового фактора от перемещения (угла поворота) управляющей степени свободы FTABLS
Отображаемые свойства
Задает кусочно-линейный импульс силового воздействия, зависящий от перемещения управляющей степени свободы (FTABLS_1). Импульс определяется произвольным количеством точек. Для описания каждой точки используется два параметра: 1 - величина перемещения управляющей степени свободы, умноженной на масштабирующий множитель; 2 - соответствующая ему величина силы. Точки должны быть упорядочены по возрастанию перемещения.
В расчетах Pradis использует
величины размерностью в системе СИ. Для
удобства пользователя в данной модели реализована возможность задания таблицы
усилий в зависимости от перемещения, выраженного в иной системе едениц. С этой
целью в списке параметров элемента присутствует масштабирующий множитель.
Масштабирующий множитель переводит размерность PRAdis (м или рад) в пользовательскую. например, таблица усилий задана в зависимости
от угла поворота управляющей степени свободы, выраженного в градусах. чтобы избавиться от пересчета таблицы
значений, нужно задать величину масштабирующего множителя, равной 180/![]() = 57.2957....
= 57.2957....
|
|
|
|
FTABLS_1. |
График табличной зависимости усилия от перемещения для модели элемента FTABLS. Каждая точка зависимости задается парой значений «перемещение-усилие». |

Таким образом, для этого элемента должно быть задано нечетное количество параметров - масштабирующий множитель и четное количество параметров, определяющих зависимость усилия от перемещения.
Если текущее перемещение управляющей степени свободы выходит за рамки табличной зависимости усилия от перемещения, то текущее усилие определяется экстраполяцией крайних отрезков, как это показано штриховой линией на рис. FTABLS_1. В связи с этим две первые и две последние точки задаваемой таблицы не должны задавать разные значения силы для одного и того же значения перемещения. Для элемента должно быть задано не менее 2х точек табличной зависимости силы от перемещения. Элемент рекомендует программе интегрирования уменьшение шага интегрирования в окрестности точек излома заданной зависимости усилия от перемещения.
Степени свободы
|
1 - |
поступательная или вращательная, по которой действует задаваемое усилие или момент; |
|
2 - |
степень свободы, на которую элемент "опирается" ; по этой степени свободы элемента будет действовать усилие противоположного знака; |
|
3 - |
управляющая степень свободы, в зависимости от перемещения (угла поворота) которой задается усилие. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Масштабирующий множитель для перемещения управляющей степени свободы |
|
- RLmax... +RLmax |
|
2 |
S1 - перемещение, определяющее первую точку зависимости усилия от перемещения |
м или рад* |
- RLmax... +RLmax |
|
3 |
F1 - сила (момент) для перемещения S1 |
Н или Н*м |
- RLmax... +Rlmax |
|
|
. . . . . |
|
|
|
2*i |
Si - перемещение, определяющее i-ю точку зависимости усилия от перемещения |
м или рад* |
Si -1 ... +RLmax |
|
2*i+1 |
Fi - сила (момент) для перемещения Si |
Н или Н*м |
- RLmax... +Rlmax |
|
|
. . . . . |
|
|
|
2*n |
Sn - перемещение, определяющее n-ю точку зависимости усилия от перемещения |
м или рад* |
Sn -1 ... +RLmax |
|
2*n+1 |
Fn - сила (момент) для перемещения Sn |
Н или Н*м |
- RLmax... +Rlmax |
*) Масштабирующий множитель равен 1, если таблица усилий задана в зависимости от перемещения, выраженного в системе единиц, принятой в расчетах PRADIS (в системе СИ). В случае использования иной системы единиц задается такое значение масштабирующего множителя, чтобы перевести размерность PRADIS в пользовательскую. Ниже приводится таблица значений масштабирующего множителя в зависимости от размерности перемещения, заданной пользователем.
Таблица значений масштабирующего множителя в зависимости от размерности перемещения:
|
Размерность перемещения в таблице усилий |
Значение масштабирующего множителя |
|
|
Поступательное |
Угловое |
|
|
м |
рад |
1 |
|
мм |
- |
1000 |
|
см |
- |
100 |
|
- |
град. |
180/p = 57.2957 |
Пример использования (см. рис. FTABLS_2)
|
|
||
|
FTABLS_2. |
Использование элемента FTABLS для моделирования рабочего цикла в двигателе внутреннего сгорания:
- угол поворота, заданный в градусах;
φ – угол поворота, заданный в радианах; k – масштабный множитель. |
|
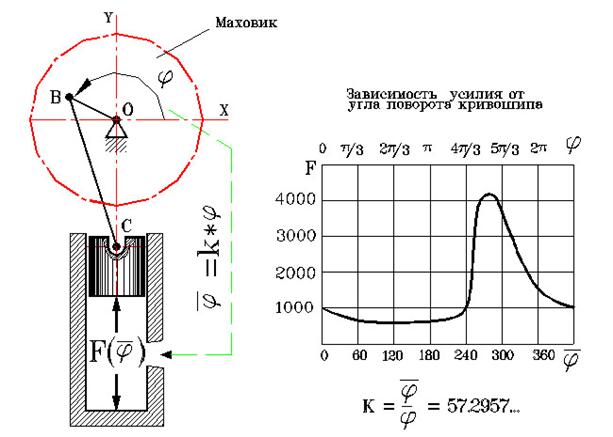
Задана зависимость усилия, воздействующего на поршень двигателя внутреннего сгорания, в зависимости от угла поворота кривошипного вала, выраженного в градусах. Предполагается, что эта таблица получена предварительным расчетом рабочих процессов в цилиндре двигателя и записана в файле FORSE.DAT в следующем виде:
|
{угол поворота (град)} |
{усилие} |
|
2, |
25, |
|
3, |
25, |
|
8, |
100, |
|
9, |
140, |
|
10, |
150, |
|
12, |
147, |
|
18, |
127, |
Начальные координаты:
ось кривошипа (точка O) - 0, 0
шарнир кривошип-шатун (точка B) - 0.02, - 0.1
шарнир шатун-поршень (точка C) - 0, - 0.5
Кривошип и шатун можно представить в виде балочного и стержневого элементов, масса которых равномерно распределена по длине стержня. Масса кривошипа - 0.2 кг, масса шатуна - 0.6 кг. Геометрический момент инерции на изгиб поперечного сечения кривошипа - 1.7e-6 м4, площадь поперечного сечения 0.9e-4 м2. Площадь поперечного сечения шатуна - 0.7e-4 м2. Материал кривошипа и шатуна - сталь.
На оси кривошипа находится маховик с моментом инерции 0.933 кг*м2. Начальная угловая скорость маховика (она соответствует начальным скоростям для всех элементов механизма) - 10 рад/с. Масса поршня - 0.3 кг.
Требуется определить изменение скорости вращения маховика по времени и оценить неравномерность ее изменения.
Поскольку таблица зависимости усилия от угла поворота задана в градусах, то масштабный коэффициент для элемента FTABLS в данном случае будет 180/p = 57.2957... Для моделирования кривошипа будем использовать балочный элемент, поскольку вращение на маховик передается по угловой координате. Для моделирования шатуна достаточно стержневого элемента.
$ DATA :
Цилиндр = 57.2957,
$ INCLUDE FORSE.DAT
Точка O = 0, 0
Точка B = 0.02, -0.10
Точка C = 0., -0.5
Начальная угловая скорость = 10
Ось X = 1
Ось Y = 2
Материал кривошипа = 0.2, 0.5, 1.7E-6,0.9E-4, 2.E11
Материал шатуна = 0.6, 0.5, 0.7E-4, 2.E11
Масса поршня = 0.3
J маховика = 0.933
$ FRAGMENT :
# BASE: 1, 2, 7
# STRUCTURE:
Маховик ' M ( 3 ; J маховика)
Кривошип ' BALKA (1 2 3 4 5 6; Точка O, Точка B, Материал кривошипа)
Шатун ' STRGN (4 5 7 8 ; Точка B, Точка C, Материал шатуна)
Поршень ' M ( 8 ; Масса поршня)
Цилиндр ' FTABLS ( 8 1 3 ; Цилиндр )
{определение начальной угловой скорости кривошипа}
'VNKS (3 4 5 6 7 8;Точка O, Точка B, Точка C, Ось Y, Начальная угловая скорость)
OUTPUT:
Угловая скорость вала 'V (3;1)
Угол поворота вала град 'X (3;57.295779579)
Усилие на цилиндре 'X (I:Цилиндр 1; 1)
2.2.1.6. Источник механической силы (момента), для которого задается табличная зависимость силового фактора от скорости (угловой скорости) управляющей степени свободы FTABLV
Отображаемые свойства
Задает кусочно-линейный импульс силового воздействия, зависящий от скорости управляющей степени свободы (FTABLV_1). Импульс определяется произвольным количеством точек. Для описания каждой точки используется два параметра: 1 - величина скорости управляющей степени свободы, умноженной на масштабирующий множитель; 2 - соответствующая ему величина силы. Точки должны быть упорядочены по возрастанию скорости.
В расчетах Pradis использует
величины размерностью в системе СИ. Для
удобства пользователя в данной модели реализована возможность задания таблицы
усилий в зависимости от скорости, выраженной в иной системе единиц. С этой
целью в списке параметров элемента присутствует масштабирующий множитель.
Масштабирующий множитель переводит размерность PRAdis (м/сек или рад/сек) в пользовательскую. например, таблица усилий задана в
зависимости от угловой скорости управляющей степени свободы, выраженной в
еденицах [град/сек]. чтобы
избавиться от пересчета таблицы значений, нужно задать величину масштабирующего
множителя, равной 180/![]() = 57.2957....
= 57.2957....
|
**** нет рисунка
|
|
|
FTABLV_1. |
********************* |
Для элемента должно быть задано нечетное количество параметров - масштабирующий множитель и четное количество параметров, определяющих зависимость усилия от скорости.
Если текущая скорость управляющей степени свободы выходит за рамки табличной зависимости усилия от скорости, то текущее усилие определяется экстраполяцией крайних отрезков, как это показано штриховой линией на рис. FTABLV_1. В связи с этим две первые и две последние точки задаваемой таблицы не должны задавать разные значения силы для одного и того же значения скорости. Для элемента должно быть задано не менее 2х точек табличной зависимости силы от скорости. Элемент рекомендует программе интегрирования уменьшение шага интегрирования в окрестности точек излома заданной зависимости усилия от скорости.
Степени свободы
|
1 - |
поступательная или вращательная, по которой действует задаваемое усилие или момент; |
|
2 - |
степень свободы, на которую элемент "опирается"; по этой степени свободы элемента будет действовать усилие противоположного знака; |
|
3 - |
управляющая степень свободы, в зависимости от скорости (угловой скорости) которой задается усилие. |
Параметры
|
Номер |
Описание |
Размерность |
Диапазон |
|
1 |
Масштабирующий множитель для скорости управляющей степени свободы |
|
- RLmax... +RLmax |
|
2 |
V1 - скорость, определяющая первую точку зависимости усилия от скорости |
м/сек или рад/сек* |
- RLmax... +RLmax |
|
3 |
F1 - сила (момент) для скорости V1 |
Н или Н*м |
- RLmax... +RLmax |
|
|
. . . . . |
|
|
|
2*i |
Vi - скорость, определяющая i-ю точку зависимости усилия от скорости |
м/сек или рад/сек |
Vi -1 ... +Rlmax |
|
2*i+1 |
Fi - сила (момент) для скорости Vi |
Н или Н*м |
- RLmax... +RLmax |
|
|
. . . . . |
|
|
|
2*n |
Vn - скорость, определяющая n-ю точку зависимости усилия от скорости |
м/сек или рад/сек |
Vn -1 ... +RLmax |
|
2*n+1 |
Fn - сила (момент) для скорости Vn |
Н или Н*м |
- RLmax... +Rlmax |
*) Масштабирующий множитель равен 1, если таблица усилий задана в зависимости от скорости, выраженной в системе единиц, принятой в расчетах PRADIS (в системе СИ). В случае использования иной системы единиц задается такое значение масштабирующего множителя, чтобы перевести размерность PRADIS в пользовательскую. Ниже приводится таблица значений масштабирующего множителя в зависимости от размерности скорости, заданной пользователем.
Таблица значений масштабирующего множителя в зависимости от размерности скорости:
|
Размерность скорости в таблице усилий |
Значение масштабирующего множителя |
|
|
Поступательная |
Угловая |
|
|
м/сек |
рад/сек |
1 |
|
м/мин |
- |
60 |
|
км/ч |
- |
3.6 |
|
- |
рад/мин |
60 |
|
- |
об./сек |
1/(2p) = 0.1592 |
|
- |
об./мин |
30/p = 9.5493 |
|
- |
град/сек |
180/p = 57.2957 |
|
- |
град/мин |
10800/p = 3437.7 |
2.2.1.7. Источник механической силы (момента), синусоидально зависящей от смещения (угла поворота) FSINX
Отображаемые свойства
Задает импульс силового воздействия, синусоидально зависящий от перемещения (угла поворота). Величина силы определяется по зависимости:
F = Fmax * sin(X + XO)
, где F - текущая величина силы;
Fmax - амплитудное значение силы;
X - текущее перемещение (угол поворота);
XO - начальное значение перемещения (угла поворота).
Степени свободы
|
1 - |
поступательная (вращательная), по которой действует задаваемый силовой фактор. |
Параметры
|
Номер |
Описание |
Размерность |
Диапазон |
|
1 |
Амплитудное значение силового фактора |
Н или Н*м |
- RLmax... +Rlmax |
|
2 |
Начальное смещение |
м или рад |
- RLmax... +Rlmax |
2.2.1.8. Источник постоянного усилия, моделирующий действие силы тяжести FG
Отображаемые свойства
Задает величину постоянного усилия, действующего на массу и равного величине силы тяжести. Усилие, генерируемое элементом, всегда действует в отрицательном направлении координатной оси.
Степени свободы
|
1 - |
поступательная, по которой действует задаваемое усилие. |
Параметры
|
Номер |
Описание |
Размерность |
Диапазон |
|
1 |
Величина массы, на которую действует сила тяжести |
кг |
0 ... +RLmax |
Пример использования
Требуется рассмотреть движение точечного инерционного элемента массой 5кг под действием силы тяжести. Текст описания объекта на языке PradiSlang:
$ DATA:
Масса = 5
$ FRAGMENT :
# BASE:1
# STRUCTURE:
Тело 'M (2; Масса)
Сила тяжести 'FG (2; Масса)
# OUTPUT:
Ускорение тела 'A (2; 1)
Скорость тела 'V (2; 1)
Перемещение тела 'S (2; 1)
Величина силы тяжести 'X (I:Сила тяжести;1)
. . .
2.2.2. Модели элементов, задающих перемещения степеней свободы
2.2.2.1. Общие сведения и рекомендации по назначению параметров
Модели элементов, задающих перемещения, являются по своей природе упругими. Это, фактически, тела, перемещающиеся по заданному закону и сообщающие степеням свободы объекта, с которыми они соединены, соответствующие перемещения за счет упругой связи. Поэтому коэффициент пропорциональности между усилием и отклонением перемещения для этих элементов имеет размерность коэффициента жесткости (Н/м или Н*м/рад).
Для идеальной кусочно-линейной зависимости перемещения от времени график ускорений будет нулевым на протяжении всего процесса за исключением точек излома (здесь ускорения бесконечно велики). График скоростей ступенчатый с постоянной скоростью на протяжении каждого линейного участка и мгновенным переходом к другому уровню скорости на другом линейном участке. Когда модель источника разности перемещений используется для разгона инерционных тел, это служит источником нежелательных колебаний, искажающих форму импульса. Увеличение коэффициента пропорциональности между усилием и отклонением перемещения увеличивает амплитуду и частоту колебаний ускорения (заметим при этом, что точность отработки заданного закона изменения перемещения от времени возрастает из-за того, что амплитуда колебаний перемещений при этом уменьшается).
При назначении параметров модели элемента и ключевых параметров программы интегрирования в этом случае можно руководствоваться следующими соображениями.
Колебания будут возникать в местах излома зависимости перемещения от времени (в эти моменты времени резко изменяется скорость, что и служит источником возмущений). например, для трапециевидного источника STR0 изменение скорости при переходе с пологого на наклонный участок можно определить по формуле:
![]() (222.1)
(222.1)
, где ![]() - разница между
заданным начальным перемещением и перемещением, соответствующим пологому
участку импульса;
- разница между
заданным начальным перемещением и перемещением, соответствующим пологому
участку импульса;
![]() - время переднего
или заднего фронта импульса.
- время переднего
или заднего фронта импульса.
Для элемента STABL0 все рассуждения будут аналогичны. Только
нужно учесть, что в этом случае возмущающая составляющая скорости - это
разность между скоростями на двух соседних участках. Для SSIN0 значение ![]() рассчитывается
по формуле:
рассчитывается
по формуле:
![]() (222.1.а)
(222.1.а)
, где A - амплитуда задаваемого перемещения;
![]() - начальная фаза в
радианах;
- начальная фаза в
радианах;
T - период синусоиды.
Задаемся величиной допустимой абсолютной погрешности отработки закона
изменения перемещения, скажем,![]() , в метрах или
радианах, в зависимости от того, поступательные или вращательные степени
свободы рассматриваются. Коэффициент пропорциональности K между усилием
и перемещением можно ориентировочно определить по зависимости:
, в метрах или
радианах, в зависимости от того, поступательные или вращательные степени
свободы рассматриваются. Коэффициент пропорциональности K между усилием
и перемещением можно ориентировочно определить по зависимости:
![]() (222.2)
(222.2)
, где M - примерная масса разгоняемого тела.
С увеличением параметра K продолжительность вычислений, как правило, возрастает из-за вынужденной необходимости отслеживать паразитные колебания и дробления величины шага до значения, соответствующего частоте собственных колебаний пружинного маятника массой M и жесткостью K. Учитывая тот факт, что эти колебания, как правило, являются несущественными с точки зрения анализируемого объекта, желательно их "задавить". Для этого назначаем параметр CONTROL программы интегрирования, вычисленный по такой ориентировочной зависимости:
![]() (222.3)
(222.3)
, где T - период колебаний пружинного маятника массой M и жесткостью K.
Если получающееся значение параметра CONTROL слишком велико по соображениям точности анализа других переходных процессов в системе, то параметр K следует назначать, исходя из зависимости (222.3), задавшись требуемой величиной CONTROL. При этом соблюдение требуемой точности отработки закона перемещений гарантируется (поскольку требованиям точности по зависимости (222.2) удовлетворяли и меньшие значения K).
При величине коэффициента пропорциональности между усилием и перемещением порядка 1e12 - 1e15 могут возникнуть проблемы со сходимостью процесса решения СнЛУ. С увеличением K они будут усугубляться. В таких случаях нужно увеличить ключевой параметр программы интегрирования DABSI.
2.2.2.2. Источник разности перемещений, изменяющейся по синусоидальному закону SSIN0
Отображаемые свойства
Задает силовое воздействие на объект, поддерживающее перемещение по одной из степеней свободы относительно перемещения по другой, изменяющееся в форме синусоиды (см. рис. 2.1.).
Степени свободы
|
1 - |
поступательная или вращательная, перемещение по которой задается; |
|
2 - |
степень свободы, относительно которой задается перемещение по первой степени свободы. |
Параметры
|
Номер |
Описание |
Размерность |
Диапазон |
|
1 |
Амплитудное значение разницы перемещений |
м или рад |
- RLmax... +Rlmax |
|
2 |
Период изменения разницы перемещений |
сек |
Smin... +Rlmax |
|
3 |
Начальная фаза |
град. |
- RLmax... +Rlmax |
|
4 |
Коэффициент пропорциональности между отклонением разности перемещений от заданной и усилием, генерируемым элементом |
Н/м или Н*м/рад |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
значение разницы перемещений, которое стремится поддерживать элемент |
м или рад |
|
|
2 |
разница между фактической величиной разницы перемещений и значением разницы перемещений, которое стремится поддерживать элемент |
м или рад |
|
Особые ситуации
Модель элемента SSIN0 контролирует соответствие заданного начального уровня разности перемещений, определяемого начальной фазой (по рис.2.1), и фактической начальной разности перемещений между степенями свободы элемента. Если фактическая начальная разность перемещений не соответствует заданной, происходит аварийное завершение расчета с выдачей соответствующего сообщения об ошибке. Эта ситуация рассмотрена в приведенном ниже примере.
Пример использования
Предположим, что пользователь предполагает задать синусоидальное перемещение тела массой 5 кг с амплитудой 1 и начальной фазой 30 градусов. Это значит, что начальное перемещение по этой степени свободы должно составлять половину амплитуды. Точность отработки закона перемещения должна быть около 1 %.
Воспользовавшись формулой (312.1.а), найдем ![]() = 54.4
м/сек. По зависимости (312.2): K = 5 * (54.4 / 0.01)2 =
1.48e8 [Н/м]. Найденное значение коэффициента жесткости определяет
период собственных колебаний системы тело-источник воздействия около 0.0015 Гц
(CONTROL можно задавать 1e-4... 2e-4).
= 54.4
м/сек. По зависимости (312.2): K = 5 * (54.4 / 0.01)2 =
1.48e8 [Н/м]. Найденное значение коэффициента жесткости определяет
период собственных колебаний системы тело-источник воздействия около 0.0015 Гц
(CONTROL можно задавать 1e-4... 2e-4).
Корректный текст описания данных и структуры объекта в этом случае может выглядеть примерно так:
$ DATA :
Амплитуда перемещения = 1
Период колебаний = 0.1
Начальная фаза = 30
K = 1.48e8
Начальное перемещение = 0.5
Масса тела = 5
$ FRAGMENT :
# BASE: 1
# STRUCT:
Источник воздействия 'SSIN0 (2 1;
Амплитуда перемещений,
Период колебаний,
Начальная фаза, K)
Начальное перемещение'SN (2;
Начальное перемещение)
Тело 'M (2; Масса тела)
Обратите внимание, что кроме источника синусоидальной разности перемещений задается начальное перемещение по соответствующей степени свободы объекта. Если модель элемента SN исключить из приведенного описания структуры, то при заданных исходных данных на первом шаге интегрирования произойдет аварийное прерывание расчета: начальное перемещение второй степени свободы должны быть равно 0.5, а фактическое значение начального перемещения составит в этом случае 0.
Исходя из предположений, принятых при расчете жесткости, ключевой параметр программы интегрирования CONTROL может быть порядка 1.e-4. При больших значениях CONTROL возможно некоторое увеличение затрат на интегрирование.
2.2.2.3. Источник разности перемещений, задаваемой таблично STABL0
Отображаемые свойства
Задает импульс силового воздействия, поддерживающий разницу перемещений между двумя степенями свободы в соответствии с заданной табличной зависимостью перемещения от времени. Форма импульса кусочно-линейная, определяется произвольным количеством точек (рис. 2.2). Для описания каждой точки используется два параметра: 1 - момент времени; 2 - разница перемещений для этого момента времени. Еще один параметр задает коэффициент пропорциональности между отклонением относительного перемещения от заданного пользователем и усилием, генерируемым элементом. Таким образом, для этого элемента должно быть задано нечетное количество параметров. Таблица зависимости перемещения от времени должна быть упорядочена по возрастанию времени.
Если начальный момент времени, заданный в таблице, превышает текущее модельное время, или текущее модельное время вышло за промежуток времени, на протяжении которого определена таблица перемещений, текущее значение задаваемого перемещения определяется экстраполяцией крайних отрезков, как это показано штриховой линией на рис. 2.2. В связи с этим две первые и две последние точки таблицы должны быть заданы для различающихся моментов времени. Для элемента должно быть задано не менее 2х точек табличной зависимости разности перемещений от времени.
Степени свободы
|
1 - |
поступательная или вращательная, перемещение (угол поворота) для которой задается; |
|
2 - |
степень свободы, относительно которой задается перемещение по первой степени свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент пропорциональности между отклонением перемещения и усилием, генерируемым элементом |
Н/м или Н*м/рад |
0 ... +RLmax |
|
2 |
t1 - момент времени, определяющий первую точку зависимости разности перемещений от времени |
сек |
0 ... +RLmax |
|
3 |
|
м или рад |
- RLmax... +RLmax |
|
|
. . . . . |
|
|
|
2*i |
ti - момент времени, определяющий i-ю точку зависимости разности перемещений от времени |
сек |
ti -1 ... +RLmax |
|
2*i+1 |
|
м или рад |
- RLmax... +RLmax |
|
|
. . . . . |
|
|
|
2*n |
tn - момент времени, определяющий n-ю точку зависимости разности перемещений от времени |
сек |
tn -1 ... +RLmax |
|
2*n+1 |
|
м или рад |
- RLmax... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Значение разницы перемещений, которое стремится поддерживать элемент |
м или рад |
|
|
2 |
разница между фактической величиной разницы перемещений и значением разницы перемещений, которое стремится поддерживать элемент |
м или рад |
|
Особые ситуации
Модель элемента STABL0 контролирует соответствие заданного начального уровня разности перемещений и фактической начальной разности перемещений между степенями свободы элемента. Начальное перемещение может определяться экстраполяцией первого из заданных отрезков характеристики элемента, как это показано на рис.2.2. Если фактическая начальная разность перемещений не соответствует заданной, происходит аварийное завершение расчета с выдачей соответствующего сообщения об ошибке. Эта ситуация рассмотрена в приведенном ниже примере.
Пример использования
Предположим, что пользователю требуется задать закон перемещения тела массой 5 кг, определяемый следующей таблицей зависимости перемещения от времени:
|
Момент времени |
Перемещение |
|
1 |
0.5 |
|
2 |
0.7 |
|
3 |
0.1 |
Начальное перемещение тела, определяемое этим законом, должно составлять: 0.5 - (0.7 - 0.5)/(2 - 1) * (1 - 0) = 0.3. Корректный текст описания данных и структуры объекта в этом случае может выглядеть примерно так:
$ DATA :
K = 1.E3
Таблица изменения перемещения = 1, 0.5,
2, 0.7,
3, 0.1
Начальное перемещение = 0.3
Масса тела = 5
$ FRAGMENT :
# BASE: 1
# STRUCT:
Источник воздействия 'STABL0(2 1; K,
Таблица изменения перемещений)
Начальное перемещение'SN (2; Начальное перемещение)
Тело 'M (2; Масса тела)
Обратите внимание, что кроме источника, задающего требуемый закон изменения перемещений по второй степени свободы, задается также начальное перемещение по соответствующей степени свободы объекта. Если модель элемента SN исключить из приведенного описания структуры, то при заданных исходных данных на первом шаге интегрирования произойдет аварийное прерывание расчета: начальное перемещение второй степени свободы должно быть равно 0.3, а фактическое значение начального перемещения составит в этом случае 0.
2.2.2.4. Источники разницы перемещений (углов поворота), изменяющейся по трапециевидному закону STR0,STRC0
Отображаемые свойства
Задает импульс силового воздействия на объект, поддерживающий разницу перемещений по двум степеням свободы, изменяющуюся по трапециевидному закону (рис. 2.3). Модель STR0 применяется для задания однократного, а STRC0 - циклически повторяющегося воздействия.
Степени свободы
|
1 - |
поступательная или вращательная, перемещение по которой задается; |
|
2 - |
степень свободы, относительно которой задается перемещение по первой степени свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Начальный уровень разницы перемещений |
м или рад |
- RLmax... +RLmax |
|
2 |
Уровень разницы перемещений для вершины импульса |
м или рад |
- RLmax... +RLmax |
|
3 |
Момент времени начала роста импульса |
сек |
0... +Rlmax |
|
4 |
Продолжительность переднего фронта импульса |
сек |
0... +Rlmax |
|
5 |
Продолжительность вершины импульса |
сек |
0... +Rlmax |
|
6 |
Продолжительность заднего фронта импульса |
сек |
0... +RLmax |
|
7 (только для STRC0) |
Продолжительность цикла |
сек |
( PAR(4)+ PAR(5)+ PAR(6))+ (RLmin ... RLmax) |
|
8 |
Коэффициент пропорциональности между отклонением перемещения и усилием, генерируемым элементом |
Н/м или Н*м/рад |
0... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
значение разницы перемещений, которое стремится поддерживать элемент |
м или рад |
|
|
2 |
разница между фактической величиной разницы перемещений и значением разницы перемещений, которое стремится поддерживать элемент |
м или рад |
|
Особые ситуации
Модели элементов STR0 и STRC0 контролируют соответствие заданного начального уровня разности перемещений и фактической начальной разности перемещений между степенями свободы элемента. Если фактическая начальная разность перемещений не соответствует заданной, происходит аварийное завершение расчета с выдачей соответствующего сообщения об ошибке. Эта ситуация аналогична ситуации, описанной в примере для элемента STABL0.
2.2.3. Модели элементов, задающих скорости степеней свободы
2.2.3.1. Общие сведения и рекомендации по назначению параметров
Модели элементов, задающих скорости, являются по своей природе вязкостными. Это, фактически, тела, движущиеся с заданной скоростью и сообщающие степеням свободы объекта, с которыми они соединены, соответствующие скорости за счет вязкостной связи. Поэтому коэффициент пропорциональности между усилием и отклонением скорости для этих элементов имеет размерность коэффициента вязкости (Н*сек/м или Н*м*сек/рад - не путать с кинематической и динамической вязкостями, являющимися характеристиками материала).
Назначение величины коэффициента пропорциональности между отклонением скорости и усилием для этих элементов "ощущается" не так хорошо, как назначение коэффициента жесткости для элементов, задающих перемещение, или массы для элементов, задающих ускорения. Поэтому при назначении этого коэффициента можно ориентироваться на следующие рекомендации.
Рассмотрим разгон массивного тела источником постоянной скорости (это справедливо для пологих участков элементов VTR0, VTABL0 и т.д.). Тогда за время dt тело приобретет скорость 95% от необходимой, если коэффициент пропорциональности примерно равен 3*M/dt, где M - масса тела; 99% скорости за тот же промежуток времени набираются при коэффициенте пропорциональности равном (4.5 ... 5.0)*M/dt.
Если движению противодействует постоянная сила, то для того, чтобы имелась принципиальная возможность набрать 95% от заданной скорости, необходимо назначать величину коэффициента пропорциональности больше, чем 20*F/V0 , где V0 - заданная скорость, F - противодействующая движению сила. Для достижения 99% скорости этот коэффициент должен быть больше, чем 100*F/V0 .
2.2.3.2. Источник постоянной скорости по одной степени свободы VC0
Отображаемые свойства
Генерирует усилие (момент), направленные на поддержание для заданной степени свободы объекта заданной постоянной скорости.
Степени свободы
|
1 - |
поступательная или вращательная, заданное значение скорости по которой поддерживается элементом. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Величина скорости, задаваемая элеметном |
м/сек или рад/сек |
- RLmax... +RLmax |
|
2 |
Коэффициент пропорциональности между отклонением скорости и усилием, генерируемым элементом |
Н*сек/м или Н*м*с/рад |
0... +RLmax |
Рабочий вектор
|
N п/п |
Описание параметра |
Размерность |
Диапазон |
|
1 |
Значение скорости, которое стремится поддерживать элемент |
м/сек или рад/сек |
|
|
2 |
Разница между фактической величиной скорости, и значением скорости, которое стремится поддерживать элемент |
м/сек или рад/сек |
|
Особые ситуации
Если генерируемое элементом значение скорости не соответствует начальным условиям, происходит аварийное прерывание расчета с выдачей соответствующего сообщения о противоречивой установке скоростей. Эта ситуация и способ ее устранения аналогичны описанным в примере для модели элемента VSIN0.
2.2.3.3. Источник разности скоростей, изменяющейся по синусоидальному закону VSIN0
Отображаемые свойства
Задает силовое воздействие на объект, поддерживающее скорость по одной из степеней свободы относительно скорости по другой, изменяющуюся в форме синусоиды (см. рис.2.1.).
Степени свободы
|
1 - |
поступательная или вращательная, скорость, по которой задается; |
|
2 - |
степень свободы, относительно которой задается скорость по первой степени свободы. |
Параметры
|
Номер |
Описание |
Размерность |
Диапазон |
|
1 |
Амплитудное значение разницы скоростей |
м/сек или рад/сек |
- RLmax... +Rlmax |
|
2 |
Период изменения разницы скоростей |
сек |
Smin... +Rlmax |
|
3 |
Начальная фаза |
град. |
- RLmax... +Rlmax |
|
4 |
Коэффициент пропорциональности между отклонением разности скоростей от заданной и усилием, генерируемым элементом |
Н*сек/м или Н*м*с/рад |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание параметра |
Размерность |
Диапазон |
|
1 |
Значение скорости, которое стремится поддерживать элемент |
м/сек или рад/сек |
|
|
2 |
Разница между фактической величиной скорости, и значением скорости, которое стремится поддерживать элемент |
м/сек или рад/сек |
|
Особые ситуации
Модель элемента VSIN0 контролирует соответствие заданного начального уровня разности скоростей, определяемого начальной фазой (по рис. 2.1.), и фактической начальной разности скоростей между степенями свободы элемента. Если фактическая начальная разность скоростей не соответствует заданной, происходит аварийное завершение расчета с выдачей соответствующего сообщения об ошибке. Эта ситуация рассмотрена в приведенном ниже примере.
Пример использования
Предположим, что пользователь предполагает задать изменение скорости тела массой 5 кг с амплитудой 1 и начальной фазой 30 градусов. Это значит, что начальная скорость по этой степени свободы должна составлять половину амплитуды. Корректный текст описания данных и структуры объекта в этом случае может выглядеть примерно так:
$ DATA :
Амплитуда скорости = 1;
Период колебаний = 0.1
Начальная фаза = 30; K = 1.E3
Начальная скорость = 0.5
Масса тела = 5
$ FRAGMENT :
# BASE: 1
# STRUCT:
Источник воздействия 'VSIN0 (2 1; Амплитуда скорости,
Период колебаний,
Начальная фаза,K)
Начальное перемещение'VN (2; Начальная скорость)
Тело 'M (2; Масса тела)
Обратите внимание, что кроме источника синусоидальной разности скоростей задается начальная скорость по соответствующей степени свободы объекта. Если модель элемента VN исключить из приведенного описания структуры, то при заданных исходных данных на первом шаге интегрирования произойдет аварийное прерывание расчета: начальную скорость по второй степени свободы должно быть равно 0.5, а фактическое значение начальной скорости составит в этом случае 0.
2.2.3.4. Источник разности скоростей, задаваемой таблично VTABL0
Отображаемые свойства
Задает импульс силового воздействия, поддерживающую разницу скоростей между двумя степенями свободы в соответствии с заданной табличной зависимостью. Форма импульса кусочно-линейная, определяется произвольным количеством точек (рис. 2.2.). Для описания каждой точки используется два параметра: 1 - момент времени; 2 - разница скоростей для этого момента времени. Еще один параметр задает коэффициент пропорциональности между отклонением скорости и усилием, генерируемым элементом. Таким образом, для этого элемента должно быть задано нечетное количество параметров. Таблица зависимости скорости от времени должна быть упорядочена по возрастанию времени.
Если начальный момент времени, заданный в таблице, превышает текущее модельное время, или текущее модельное время вышло за промежуток времени, на протяжении которого определена таблица скоростей, текущее значение задаваемой скорости определяется экстраполяцией крайних отрезков, как это показано штриховой линией на рис. 2.2. В связи с этим две первые и две последние точки характеристики не должны иметь одинаковое значение времени. Для элемента должно быть задано не менее 2х точек табличной зависимости разности скоростей от времени.
Степени свободы
|
1 - |
поступательная или вращательная, скорость по которой задается элементом; |
|
2 - |
степень свободы, относительно которой задается скорость по первой степени свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент пропорциональности между отклонением скорости и усилием, генерируемым элементом |
Н * сек/м или Н*м*с/рад |
0... +RLmax |
|
2 |
t1 - момент времени, определяющий первую точку зависимости разности скоростей от времени |
сек |
0... RLmax |
|
3 |
DV1 - требуемая разность скоростей в момент времени t1 |
м/сек или рад/сек |
- Rlmax... +Rlmin |
|
|
. . . . . |
|
|
|
2*i |
ti - момент времени, определяющий i-ю точку зависимости разницы скоростей от времени |
сек |
ti -1 ... +RLmax |
|
2*i+1 |
DVi - требуемая разность скоростей в момент времени ti |
м/сек или рад/сек |
- Rlmax... +RLmax |
|
|
. . . . . |
|
|
|
2*n |
tn - момент времени, определяющий n-ю точку зависимости разницы скоростей от времени |
сек |
tn-1 ... +RLmax |
|
2*n+1 |
DVn - требуемая разность скоростей в момент времени tn |
м/сек или рад/сек |
- Rlmax... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Значение скорости, которое стремится поддерживать элемент |
м/сек или рад/сек |
|
|
2 |
Разница между фактической величиной разницы скоростей и значением разницы скоростей, которое стремится поддерживать элемент |
м/сек или рад/сек |
|
Особые ситуации
Модель элемента VTABL0 контролирует соответствие заданного начального уровня разности скоростей, определяемого начальной фазой (по рис. 2.1.), и фактической начальной разности скоростей между степенями свободы элемента. Если фактическая начальная разность скоростей не соответствует заданной, происходит аварийное завершение расчета с выдачей соответствующего сообщения об ошибке. Эта ситуация и способ ее устранения аналогичны описанным в примере для элемента VSIN0.
2.2.3.5. Источники разности скоростей, изменяющейся по трапециевидному закону VTR0, VTRC0
Отображаемые свойства
Задает импульс силового воздействия на объект, поддерживающий изменяющуюся по трапециевидному закону разницу скоростей между двумя степенями свободы объекта. (рис. 2.3). Модель VTR0 применяется для задания однократного, а VTRC0 - циклически повторяющегося воздействия.
Степени свободы
|
1 - |
поступательная или вращательная, скорость которой задается; |
|
2 - |
степень свободы, относительно которой задается скорость по первой степени свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Начальный уровень разницы скоростей |
м/сек или рад/сек |
- RLmax... +RLmax |
|
2 |
Уровень разницы сокростей для вершины импульса |
м/сек или рад/сек |
- RLmax... +RLmax |
|
3 |
Момент времени начала роста импульса |
сек |
0... +Rlmax |
|
4 |
Продолжительность переднего фронта импульса |
сек |
0... +Rlmax |
|
5 |
Продолжительность вершины импульса |
сек |
0... +Rlmax |
|
6 |
Продолжительность заднего фронта импульса |
сек |
0... +RLmax |
|
7 (только для VTRC0) |
Продолжительность цикла |
сек |
( PAR(4)+ PAR(5)+ PAR(6))+ (RLmin ... RLmax) |
|
8 |
Коэффициент пропорциональности между отклонением скорости и усилием, генерируемым элементом |
Н*сек/м или Н*м*с/рад |
0... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Значение скорости, которое стремится поддерживать элемент |
м/сек или рад/сек |
|
|
2 |
Разница между фактической величиной разници скоростей и значением разницы скоростей, которое стремится поддерживать элемент |
м/сек или рад/сек |
|
Особые ситуации
Модели элементов VTR0 и VTRC0 контролируют соответствие заданного начального уровня разности скоростей и фактической начальной разности скоростей между степенями свободы элемента. Если фактическая начальная разность скоростей не соответствует заданной, происходит аварийное завершение расчета с выдачей соответствующего сообщения об ошибке. Эта ситуация и способ ее устранения аналогичны описанным в примере для элемента VSIN0.
2.2.4. Модели элементов, задающих ускорения степеней свободы
2.2.4.1. Общие сведения
Модели элементов, задающих ускорения, являются инерционными. Это, фактически, тела, движущиеся с заданным ускорением и сообщающие степеням свободы объекта, с которыми они соединены, соответствующие ускорения за счет инерционной связи. Поэтому коэффициент пропорциональности между усилием и отклонением скорости для этих элементов имеет размерность массы или момента инерции (кг или кг*м 2). Чем больше масса связи, тем точнее элемент будет воспроизводить заданный закон изменения ускорения.
2.2.4.2. Источник постоянного ускорения по одной степени свободы AC
Отображаемые свойства
Генерирует усилие (момент), направленные на поддержание для заданной степени свободы объекта заданного постоянного ускорения.
Степени свободы
|
1 - |
поступательная или вращательная, заданное значение ускорения по которой поддерживается элементом. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Величина ускорения, задаваемая элементом |
м/сек2 или рад/сек2 |
- Rlmax... +RLmax |
|
2 |
Коэффициент пропорциональности между отклонением ускорения и усилием, генерируемым элементом |
кг или кг*м2 |
0... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
значение ускорения, которое стремится поддерживать элемент |
м/сек2 или рад/сек2 |
- Rlmax... +RLmax |
|
2 |
разница между фактической величиной ускорения, и значением ускорения, которое стремится поддерживать элемент |
м/сек2 или рад/сек2 |
0... +RLmax |
2.2.4.3. Источник разности ускорений, изменяющейся по синусоидальному закону ASIN
Отображаемые свойства
Задает силовое воздействие на объект, поддерживающее ускорение по одной из степеней свободы относительно ускорения по другой, изменяющуюся в форме синусоиды (см. рис. 2.1).
Степени свободы
|
1 - |
поступательная или вращательная, ускорение по которой задается; |
|
2 - |
степень свободы, относительно которой задается ускорение по первой степени свободы |
Примечание. Если вторая степень свободы закреплена, то элементом будет задаваться абсолютное ускорение по первой степени свободы.
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Амплитудное значение разницы ускорений |
м/сек2 или рад/сек2 |
- Rlmax... +RLmax |
|
2 |
Период изменения разницы ускорений |
сек |
Smin... +Rlmax |
|
3 |
Начальная фаза |
град. |
- Rlmax... +Rlmax |
|
4 |
Коэффициент пропорциональности между отклонением ускорения и усилием, генерируемым элементом |
|
|
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Значение разницы ускорений, которое стремится поддерживать элемент |
м/сек2 или рад/сек2 |
|
|
2 |
Разница между фактической величиной разницы ускорений, и значением ускорения, которое стремится поддерживать элемент |
м/сек2 или рад/сек2 |
|
2.2.4.4. Источник разности ускорений, задаваемой таблично ATABL
Отображаемые свойства
Задает импульс силового воздействия, поддерживающую разницу ускорений между двумя степенями свободы в соответствии с заданной табличной зависимостью. Форма импульса кусочно-линейная, определяется произвольным количеством точек (рис. 2.2). Для описания каждой точки используется два параметра: 1 - момент времени; 2 - разница ускорений для этого момента времени. Еще один параметр задает коэффициент пропорциональности между отклонением ускорения и усилием, генерируемым элементом. Таким образом, для этого элемента должно быть задано нечетное количество параметров. Таблица, задающая зависимость ускорения от времени, должна быть упорядочена по времени.
Если начальный момент времени, заданный в таблице, превышает текущее модельное время, или текущее модельное время вышло за промежуток времени, на протяжении которого определена таблица ускорений, текущее значение задаваемого ускорения определяется экстраполяцией крайних отрезков, как это показано штриховой линией на рис. 2.2. В связи с этим две первые и две последние точки характеристики не должны иметь одинаковое значение времени. Для элемента должно быть задано не менее 2х точек табличной зависимости разности ускорений от времени.
Степени свободы
|
1 - |
поступательная или вращательная, ускорение по которой задается элементом; |
|
2 - |
степень свободы, относительно которой задается ускорений по первой степени свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент пропорциональности между отклонением ускорения и усилием, генерируемым элементом |
кг или кг*м2 |
0... +RLmax |
|
2 |
t1 - момент времени, определяющий первую точку зависимости разности ускорений от времени |
сек |
0... +RLmax |
|
3 |
DA1 - требуемая разность скоростей в момент времени t1 |
м/сек2 или рад/сек2 |
- Rlmax... +Rlmin |
|
|
. . . . . |
|
|
|
2*i |
ti - момент времени, определяющий i-ю точку зависимости разницы ускорений от времени |
сек |
ti -1 ... +RLmax |
|
2*i+1 |
DAi - требуемая разность ускорений в момент времени ti |
м/сек2 или рад/сек2 |
- Rlmax... +RLmax |
|
|
. . . . . |
|
|
|
2*n |
tn - момент времени, определяющий n-ю точку зависимости разницы ускорений от времени |
сек |
tn-1 ... +RLmax |
|
2*n+1 |
DAn - требуемая разность ускорений в момент времени tn |
м/сек2 или рад/сек2 |
- Rlmax... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Значение разницы ускорений, которое стремится поддерживать элемент |
м/сек2 или рад/сек2 |
|
|
2 |
разница между фактической величиной разницы ускорений, и значением ускорения, которое стремится поддерживать элемент |
м/сек2 или рад/сек2 |
|
2.2.4.5. Источники разности ускорений, изменяющейся по трапециевидному закону ATR, ATRC
Отображаемые свойства
Задает импульс силового воздействия на объект, изменяющийся по трапециевидному закону (рис. 2.3). Модель ATR применяется для задания однократного, а ATRC - циклически повторяющегося воздействия.
Степени свободы
|
1 - |
поступательная или вращательная, ускорение которой задается; |
|
2 - |
степень свободы, относительно которой задается ускорение по первой степени свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Начальный уровень разницы ускорений |
м/сек2 или рад/сек2 |
- RLmax... +RLmax |
|
2 |
Уровень разницы ускорений для вершины импульса |
м/сек2 или рад/сек2 |
- RLmax... +RLmax |
|
3 |
Момент времени начала роста импульса |
сек |
0... +Rlmax |
|
4 |
Продолжительность переднего фронта импульса |
сек |
0... +Rlmax |
|
5 |
Продолжительность вершины импульса |
сек |
0... +Rlmax |
|
6 |
Продолжительность заднего фронта импульса |
сек |
0... +RLmax |
|
7 (только для ATRC) |
Продолжительность цикла |
сек |
( PAR(4)+ PAR(5)+ PAR(6))+ (RLmin ... RLmax) |
|
8 |
Коэффициент пропорциональности между отклонением ускорения и усилием, генерируемым элементом |
кг или кг*м2 |
0... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Значение скорости, которое стремится поддерживать элемент |
м/сек2 или рад/сек2 |
|
|
2 |
Разница между фактической величиной разницы ускорений и значением ускорения, которое стремится поддерживать элемент |
м/сек2 или рад/сек2 |
|
2.2.5. Двигатели
2.2.5.1. Общие сведения
В базовой библиотеке PRADIS имеется несколько моделей элементов, позволяющих воспроизводить заданную зависимость движущего усилия от скорости (движущего момента от угловой скорости). Эти элементы условно отнесены к двигателям.
Элементы DVLT и DVLU воспроизводят механическую характеристику двигателя в виде наклонной прямой в координатах M = f(w). Элемент DVLT управляется по времени, для элемента DVLU предусмотрена управляющая степень свободы. Могут быть использованы для моделирования работы двигателей постоянного тока с параллельным возбуждением, а также для упрощенного моделирования работы асинхронных и синхронных двигателей на рабочих участках механической характеристики.
С помощью элемента DVTBLU можно моделировать механическую характеристику более сложной формы, состоящую из нескольких прямолинейных участков. Он также снабжен управляющей степенью свободы. Элемент можно использовать для воспроизведения механической характеристики двигателей постоянного тока с последовательным возбуждением, двигателей внутреннего сгорания и т.п.
Специализированный элемент DVAU предназначен для воспроизведения естественной механической характеристики асинхронного двигателя.
Для всех двигателей в качестве исходных данных должны задаваться моменты инерции подвижных частей (ротор и конструктивные элементы, связанные с ротором, например, шкив). Кроме того, предусмотрена возможность задания момента инерции корпуса двигателя (для тех случаев, когда требуется расчет реактивных моментов, колебаний корпуса двигателя и его опор и т.д.). Если корпус двигателя принимается неподвижным, его момент инерции можно принимать нулевым. Наличие в моделях элементов DVLT, DVLU, DVAU и DVTBLU моментов инерции подвижных частей делает важным различие между движущим моментом и моментом на выходном валу двигателя. Под движущим моментом понимается момент, создаваемый внутри двигателя и приводящий к вращению выходного вала и связанных с ним подвижных частей. Поскольку часть энергии, зависящая от углового ускорения вала двигателя, тратится на разгон ротора, то момент на выходном валу двигателя будет равен движущему моменту за вычетом части момента, которая тратится на разгон ротора. В частном случае, когда рассматривается холостой разгон двигателя, момент на выходном валу будет равен 0.
$ FRAGMENT :
# BASE: 1
# STRUCT:
Двигатель 'DVLT (2 1; Параметры двигателя,
Момент инерции ротора, 0)
# OUTPUT:
Момент на выходном валу ' X (I:Двигатель(1); 1)
2.2.5.2. Модель двигателя с линейной механической характеристикой, включающегося в заданный интервал времени DVLT
Отображаемые свойства
В момент включения двигателя на систему со стороны двигателя начинает воздействовать момент, определяемый заданной механической характеристикой двигателя (рис.DVLU_1.а.). Если в момент пуска вал двигателя имеет не нулевую скорость, то в этот момент на систему начнет воздействовать не пусковой момент, а момент, определяемый текущей угловой скоростью. В момент выклю2чения двигателя его активное воздействие на систему прекращается. Моменты инерции корпуса и вала двигателя учитываются в элемента независимо от того, в каком состоянии (включенном или выключенном) находится двигатель.
Из четырех показанных на рис. DVLU_1.а. характеристик две нельзя получить для реального двигателя, поскольку они определяют неограниченное увеличение оборотов вала. При небольшом изменении скорости для двигателя с такой характеристикой момент на валу двигателя возрастает в том же направлении, что приводит к большему изменению угловой скорости. Поэтому для этой модели элемента запрещены такие характеристики, которые определяются пусковым моментом и угловой скоростью холостого хода разных знаков. Модель элемента DVLT может использоваться для воздействия не только на вращательные, но и на поступательные степени свободы объекта. При этом она будет реализовывать заданную зависимость усилия от скорости.
Размерности параметров элемента, приведенные в таблице, рассчитаны на использование двигателя для задания вращательного движения. Если задается поступательное движение, то размерности соответствующих параметров должны быть изменены.
Степени свободы
|
1 - |
соответствует валу двигателя; |
|
2 - |
соответствует корпусу двигателя. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Пусковой момент двигателя (момент на валу при нулевой скорости) |
Н*м |
- Rlmax... +RLmax |
|
2 |
Угловая скорость холостого хода (w) |
рад/сек |
- Rlmax... Smin, Smin... +Rlmax |
|
3 |
t1 - момент времени, в который включается двигатель |
сек |
0... +RLmax |
|
4 |
t2 - момент времени, в который выключается двигатель |
сек |
t1... +RLmax |
|
5 |
Момент инерции вала двигателя, включая инерцию всех подвижных частей, связанных с валом |
кг*м2 |
0... +RLmax |
|
6 |
Момент инерции корпуса двигателя |
кг*м2 |
0... +Rlmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Относительное падение угловой скорости |
|
|
|
2 |
Величина относительного момента (Mmax - M) / Mmax |
|
|
2.2.5.3. Модель двигателя с линейной механической характеристикой, управляемого потенциалом DVLU
Отображаемые свойства
Со стороны двигателя на систему воздействует момент, получающийся умножением момента, взятого с характеристики двигателя (рис.DVLU_1), на потенциал управляющей степени свободы. Это позволяет моделировать не только двигатели с чисто прямолинейной характеристикой, но и двигатели, характеристика которых изменяется с течением времени (например, пуск двигателя постоянного тока с параллельным возбуждением). При этом необходимо учитывать, что управляющая степень свободы обладает единичной инерционностью. Если потенциал управляющей степени свободы меньше или равен 0, то двигатель считается выключенным. В момент выключения двигателя его активное воздействие на систему прекращается. Для управления двигателем можно использовать источники кинематических воздействий типа VC, VTABL0 и т.д.
|
|
|
|
DVLU_1. |
Зависимости момента от угловой скорости для элемента DVLU: а) возможные механические характеристики для различных сочетаний пускового момента и скорости холостого хода. Характеристики 1 и 2 являются допустимыми, 3 и 4 – запрещенными; б) семейство механических характеристик при различных значениях потенциала управляющей степени свободы. При U=1 воспроизводится заданная механическая характеристика. |
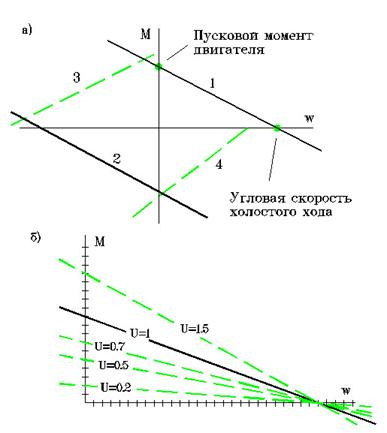
Моменты инерции корпуса и вала двигателя учитываются в элементе независимо от того, в каком состоянии (включенном или выключенном) находится двигатель. Момент на валу двигателя и угловая скорость вала никак не влияют на потенциал управляющего узла. Как и для модели элемента DVLT, пусковой момент и угловая скорость для данной элемента должны быть одного знака.
Модель элемента DVLU может использоваться для воздействия не только на вращательные, но и на поступательные степени свободы объекта. При этом она будет реализовывать заданную зависимость усилия от скорости. Размерности параметров элемента, приведенные в таблице, рассчитаны на использование двигателя для задания вращательного движения. Если задается поступательное движение, то размерности соответствующих параметров должны быть изменены.
Степени свободы
|
1 - |
соответствует валу двигателя; |
|
2 - |
соответствует корпусу двигателя; |
|
3 - |
управляющая степень свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Пусковой момент двигателя (момент на валу при нулевой скорости) |
Н*м |
- Rlmax... +RLmax |
|
2 |
Угловая скорость холостого хода (w) |
рад/сек |
- Rlmax... Smin, Smin... +Rlmax |
|
3 |
Момент инерции вала двиателя, включая инерцию всех подвижных частей, связанных с валом |
кг*м2 |
0 ... +RLmax |
|
4 |
Момент инерции корпуса двинателя |
кг*м2 |
0 ... +Rlmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Относительное падение угловой скорости |
|
|
|
2 |
Величина относительного момента (Mmax - M) / Mmax |
|
|
Пример использования
Необходимо провести анализ включения привода пресса. В состав привода входит маховик с моментом инерции Jм = 1080 кг*м 2. Для его разгона используется двигатель постоянного тока МП-72 . Между двигателем и маховиком имеется понижающая обороты передача, передаточное отношение передачи u=2. Передача рассчитана на номинальный момент Mн = 1.5e3 Н*м; ее к.п.д., включая к.п.д. опор маховика и вала двигателя, h = 95%. Параметры двигателя: мощность W = 75 кВт, номинальная частота wн = 54.5 рад/с. Двигатель рассчитан на работу в сети 220 В, номинальный ток 374 А, паспортное сопротивление цепи якоря - 0.0133 Ом, момент инерции якоря - 14 кг*м 2. Структура модели рассматриваемого процесса изображена на рис. DVLU_2.
1) Расчет параметров естественной механической характеристики двигателя (используемые зависимости см. приложение, [14]).
|
|
|
|
DVLU_2. |
Расчетная схема разгона привода двигателем постоянного тока. |
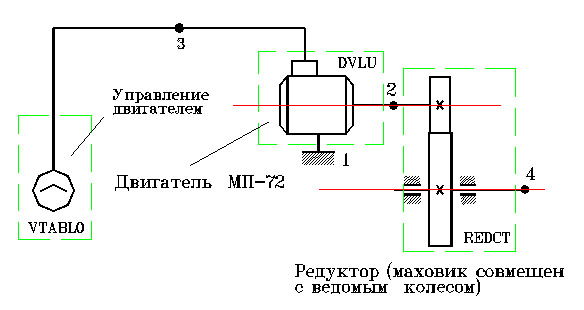
Номинальный момент двигателя:
Mн = P / wн = 75000 / 54.5 = 1376 [Н*м]
Номинальное сопротивление двигателя:
Rн = U / Iя = 220/374 = 0.588 [Ом]
Относительное сопротивление цепи якоря и относительное падение частоты вращения двигателя на номинальном режиме:
r* = Rя / Rн + 0.01 = 0.0326
Sн = r*
(если бы паспортные данные двигателя были бы не известны, то
определение Sн по укрупненной зависимости дает: Sн =
r* = 0.3 / ![]() = 0.0346, что
практически не внесло бы погрешности в дальнейшие рассуждения).
= 0.0346, что
практически не внесло бы погрешности в дальнейшие рассуждения).
Угловая скорость холостого хода и пусковой момент:
w0 = wн /(1-S н) = 54.5/(1-0.0326) = 56.3 [рад/сек]
Mпуск = Mн * w0 /( w0 - wн ) = 1376 /0.0326 = 4.22e4 [Н*м]
2) Определение пусковых характеристик двигателя.
Для построения пусковых характеристик двигателя зададимся величиной пикового момента, отнесенного к номинальному, M1* = 2.5, и тремя ступенями пускового резистора. Тогда отношение пикового момента к переключающему:
L = ( 1 / (0.0326*2.5))1/3 = 2.306
Это говорит о том, что при разгоне двигателя пиковые моменты будут составлять 2.5 номинального, а переключающие - 2.5/2.306 = 1.08 номинального.
3) Подбор параметров источника потенциала, управляющего работой двигателя.
Теперь подберем требуемый закон изменения потенциала управляющей степени свободы. На первой ступени разгона пусковой момент двигателя, определенный по искусственной характеристике, должен быть равен:
M пи1 = M1 = Mн * 2.5 = 1376 * 2.5 = 3440 [Н/м],
что меньше естественного пускового момента в
M пе/ M пи1 = 4.22e4 / 3440 = 12.3 раза.
Таким образом, на первой ступени разгона потенциал управляющей степени свободы должен быть:
P1 = 1/ 12.3 = 0.081
На каждой последующей ступени потенциал должен быть больше в L раз:
P2 = P1 * L = 0.19
P3 = P2 * L = 0.44
Коэффициент пропорциональности между отклонением потенциала и потоком (усилием), генерируемым управляющим элементом, для двигателя серии Mп определяем с использованием электромагнитной постоянной времени T:
T = 0.05P + 0.17*![]() = 0.05*75 + 0.17*
= 0.05*75 + 0.17*![]() =
5.22 [сек]
=
5.22 [сек]
m 1 = 1/(T * P1) = 2.2
m 2 = 1/(T * P2) = 0.96
m 3 = 1/(T * P3) = 0.42
m e = 1/T = 0.19
Приняв коэффициент m = 2.2 > m 2, m 3 и m е, перейдем к идеализированному моделированию пуска двигателя (пиковые моменты на второй и третьей ступенях разгона и при переходе на естественную характеристику будут сглажены меньше, чем это будет в реальности). Время работы каждой из ступеней пускового резистора подберем, сформировав математическую модель процесса и сделав несколько пробных расчетов. Для начала предположим, что ступени резистора отключаются через каждые 10 секунд (в тексте задания, приводимом ниже, указаны уже подобранные значения моментов отключения пусковых резисторов и промежутки времени их работы). Двигатель включается в момент времени t = 0.1 с.
4) Прочие параметры.
Для моделирования понижающей передачи используется модель передачи с потерями. Для нее: передаточное отношение равно u = 2; к.п.д. h= 0.95; номинальный момент на ведущем колесе Mн = 1 500 Н*м. Жесткость передачи, поскольку она не указана в задании, выберем достаточно большой, например, k = 1e6 Н*м/рад. Момент инерции ведущей шестерни, находящейся на валу двигателя, примем меньше момента инерции маховика пропорционально 4ой степени передаточного отношения:
Jшестерни = 1080 / 24 = 67.5 кг*м2
5) Интересующие результаты расчета:
- угловая скорость вала двигателя;
- момент на двигателе;
- фактическое значение управляющего потенциала;
- задаваемое значение управляющего потенциала;
- относительное снижение оборотов двигателя;
- величина относительного момента.
С учетом приведенных рассуждений и рис. DVLU_2, получим следующий текст задания на языке PradiSLang:
$ DATA:
Пусковой момент двигателя = 4.22e4
Угловая скорость холостого хода = 56.3
Момент инерции якоря = 14
Момент инерции корпуса = 0
Управление двигателем = {0.19 e3,} 2.2,
0, 0,
0.1, 0.087, {1 ступень разгона}
4.6, 0.087, { }
4.6, 0.2, {2 ступень разгона}
6.75,0.2, { }
6.75,0.46, {3 ступень разгона}
7.6, 0.46, { }
7.6, 1.0, {естественная }
15.2, 1.0 {характеристика }
Момент инерции шкива = 67.5
Момент инерции маховика = 1080
Параметры редуктора = 2, 0.95, 1.5e3, 1.e6
$ FRAGMENT :
# BASE: 1
# STRUCTURE :
Двигатель 'DVLU (2 1 3;Пусковой момент двигателя,
Угловая скорость холостого хода,
Момент инерции якоря,
Момент инерции корпуса)
Управляющий элемент 'VTABL0 (3 1; Управление двигателем)
Редуктор 'REDCT (2 4; Параметры редуктора,
Момент инерции шкива,
Момент инерции маховика)
# OUTPUT :
Угловая скорость вала двигателя 'V (2;1)
Управляющий потенциал 'V (3;1)
Задаваемый управляющий потенциал'X ( W:Управляющий элемент(1);1)
Момент на двигателе 'X (I:Двигатель;1)
Относ.снижение оборотов двигат. 'X (W:Двигатель(1);1)
Величина относительного момента 'X (W:Двигатель(2);1)
#MAP:
$ RUN:
Разгон двигателя 'SHTERM (END=50, SMAX=0.1;
Угловая скорость вала двигателя = (0,100),
Управляющий потенциал = (0,1),
Задаваемый управляющий потенциал= (0,1),
Момент на двигателе = (0,5000),
Величина относительного момента = (0,0.01) )
$ PRINT:
Результаты расчета 'DISP (;
Угловая скорость вала двигателя,
Управляющий потенциал ,
Задаваемый управляющий потенциал,
Момент на двигателе ,
Величина относительного момента )
$ END
Результаты расчетов приведены на рис. DVLU_3.
|
|
|
|
DVLU_3. |
Результаты расчета разгона привода. |

2.2.5.4. Модель двигателя с кусочно-линейной механической характеристикой, задаваемой таблично DVTBLU
Отображаемые свойства
Со стороны двигателя на систему воздействует момент, получающийся умножением момента, взятого с характеристики двигателя (рис.DVTBLU_1), на потенциал управляющей степени свободы.
Правила задания характеристики двигателя.
|
|
|
|
DVTBLU_1. |
Двигатель с таблично задаваемой зависимостью момента от угловой скорости. Каждая точка этой зависимости задается парой значений ωi – Mi. Первый и последний отрезки характеристики не должны быть вертикальными (они используются для экстраполяции значений момента за пределами заданного участка характеристики). |
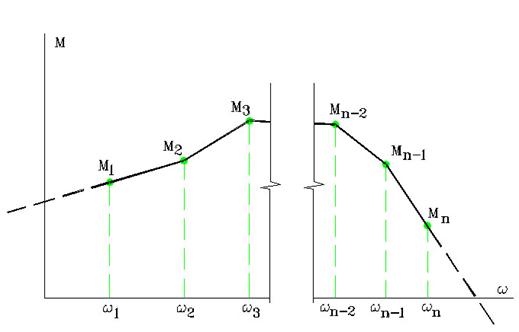
1. Точки характеристики двигателя должны быть упорядочены по возрастанию угловой скорости wi =< wi+1. Для двух первых и двух последних точек характеристики должно выполняться условие wi < wi+1.
2. Должно быть задано как минимум две точки характеристики.
При управлении работой двигателя с помощью потенциала управляющей степени свободы необходимо учитывать, что управляющая степень свободы обладает единичной инерционностью. Если потенциал управляющей степени свободы меньше или равен 0, то двигатель считается выключенным. В момент выключения двигателя его активное воздействие на систему прекращается. Моменты инерции корпуса и вала двигателя учитываются в элементах независимо от того, в каком состоянии (включенном или выключенном) находится двигатель. Момент на валу двигателя и угловая скорость вала никак не влияют на потенциал управляющего узла.
Модель элемента DVTBLU может использоваться для воздействия не только на вращательные, но и на поступательные степени свободы объекта. При этом она будет реализовывать заданную зависимость усилия от скорости. Размерности параметров элемента, приведенные в таблице, рассчитаны на использование двигателя для задания вращательного движения. Если задается поступательное движение, то размерности соответствующих параметров должны быть изменены.
Степени свободы
|
1 - |
соответствует валу двигателя; |
|
2 - |
соответствует корпусу двигателя; |
|
3 - |
управляющая степень свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Момент инерции вала двигателя, включая инерцию всех подвижных частей, связанных с валом |
кг*м2 |
0... +RLmax |
|
2 |
Момент инерции корпуса двигателя |
кг*м2 |
0... +Rlmax |
|
3 |
w1 - угловая скорость для первой заданной точки характеристики |
рад/сек |
0... +Rlmax |
|
4 |
M1 - движущий момент на валу двигателя в первой точке |
Н*м |
- Rlmax... +RLmax |
|
|
. . . . . |
|
|
|
2*i+1 |
wi - угловая скорость для i-ой заданной точки характеристики |
рад/сек |
wi -1... +Rlmax |
|
2*i+2 |
Mi - движущий момент на валу двигателя в i-ой точке |
Н*м |
- Rlmax... +RLmax |
|
|
. . . . . |
|
|
|
2*n+1 |
wn - угловая скорость для n-ой заданной точки характеристики |
Н*м |
wn -1... +Rlmax |
|
2*n+2 |
Mn - движущий момент на валу двигателя в n-ой точке |
Н*м |
- Rlmax... +RLmax |
2.2.5.5. Элемент, воспроизводящий рабочую характеристику асинхронного двигателя, управляемый потенциалом DVAU
Отображаемые свойства
Со стороны двигателя на систему воздействует момент, получающийся умножением момента, взятого с характеристики двигателя (рис.DVAU_1), на потенциал управляющей степени свободы. Моделируются двигатели с синхронным числом оборотов ротора 500...3000 1/мин. По заданной номинальной угловой скорости вала элемент автоматически подбирает ближайшую синхронную скорость, соответствующую этому числу оборотов. Если номинальное число оборотов меньше 500 1/мин, считается, что двигатель имеет синхронное число оборотов 500. Если номинальное число оборотов превышает 3000, выдается сообщение о неверном параметре и расчет завершается.
При управлении работой двигателя с помощью потенциала управляющей степени свободы необходимо учитывать, что управляющая степень свободы обладает единичной инерционностью. Если потенциал управляющей степени свободы меньше или равен 0, то двигатель считается выключенным. В момент выключения двигателя его активное воздействие на систему прекращается. Моменты инерции корпуса и вала двигателя учитываются в элементе независимо от того, в каком состоянии (включенном или выключенном) находится двигатель. Момент на валу двигателя и угловая скорость вала никак не влияют на потенциал управляющего узла.
|
|
|
|
DVAU_1. |
Основные параметры, задающие механическую характеристику асинхронного двигателя: ωн – номинальная угловая скорость двигателя; Mн – номинальный момент двигателя (Mн=Рн/ ωн); Θ – отношение пускового момента к номинальному (θ=Мпуск/Мн); λ – отношение максимального момента к номинальному (λ=Mмакс/Мн) |
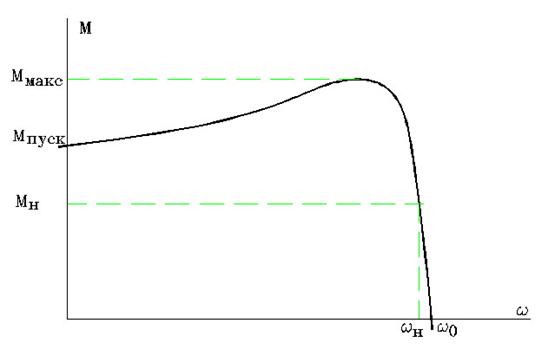
Модель элемента DVAU может использоваться для воздействия не только на вращательные, но и на поступательные степени свободы объекта. При этом она будет реализовывать заданную зависимость усилия от скорости. Размерности параметров элемента, приведенные в таблице, рассчитаны на использование двигателя для задания вращательного движения. Если задается поступательное движение, то размерности соответствующих параметров должны быть изменены.
Степени свободы
|
1 - |
соответствует валу двигателя; |
|
2 - |
соответствует корпусу двигателя; |
|
3 - |
управляющая степень свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Номинальная мощность двигателя |
Вт |
0... +Rlmax |
|
2 |
wн - номинальная угловая скорость вала |
рад/сек |
- Rlmax... 314.2 |
|
3 |
q - отношение пускового момента к номинальному |
|
Smin... l |
|
4 |
Отношение максимального момента к номинальному ( l ) |
|
1.1... 4 |
|
5 |
Момент инерции вала двигателя, включая инерцию всех подвижных частей, связанных с валом |
кг*м2 |
0... +RLmax |
|
6 |
Момент инерции корпуса двигателя |
кг*м2 |
0... +Rlmax |
Примечание. Для характеристик двигателей, имеющих малые отношения максимального момента к номинальному (l = 1.1 ... 2.5), q = l и очень жесткую характеристику (малые номинальные скольжения) обычно не удается с хорошей точностью подобрать параметры формулы Клосса. В этом случае выдается сообщение:
DVAU: Для заданных значений параметров двигателя не удалось подобрать соответствующую механическую характеристику
- и расчет завершается аварийно. Для серийных двигателей появление такого сообщения маловероятно. Однако, если это сообщение появилось, обычно бывает достаточно очень незначительно (на тысячные доли процента и меньше) увеличить l или уменьшить q.
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Относительное падение угловой скорости |
|
|
|
2 |
Величина относительного момента M / Mmax |
|
|
2.3. Пространственные элементы
2.3.1. Модели силовых воздействий
2.3.1.1. Элемент, распределяющий постоянное давление на пространственный треугольник FPRS3D
Отображаемые свойства
Распределяет равномерное давление по узлам пространственного треугольника. Предполагается, что давление положительной величины прикладывается к треугольнику со стороны внешней нормали (усилие, создаваемое этим давлением, имеет направление, обратное направлению внешней нормали). Внешняя нормаль к треугольнику определяется векторным произведением AB x AC (см. рис. FPRS3D_1). Если точки A, B и C расположены на одной прямой (нормаль к треугольнику и его площадь определить невозможно), выдается сообщение об ошибке. Если эта ситуация возникает по ходу расчета, то модель элемента устанавливает требование уменьшить шаг интегрирования.
Величина прикладываемого к треугольнику усилия определяется по зависимости:
Fр = p*S*k
, где Fр - суммарная величина усилия, действующего на треугольник;
p - текущее давление;
S - текущая площадь треугольника, определяемая текущими координатами точек A, B и C;
k - величина масштабирующего коэффициента. В случае, если координаты задаются в метрах, а давления считаются в МПа, то значение коэффициента k принимается равным 1.e6. Отрицательные величины k могут использоваться для изменения направления действующего давления.
|
|
|
|
FPRS3D_1. |
Элемент, распределяющий равномерное давление на пространственный треугольник а) теоретические параметры, определяющие положение треугольника в пространстве: Xа, Yа, Zа – координаты точки А; Xb, Yb, Zb – координаты точки B; Xc, Yc, Zc – координаты точки C; n – внешняя нормаль к плоскости треугольника; б) суммарная величина действующего на треугольник усилия и разнесение этого усилия по узлам. |
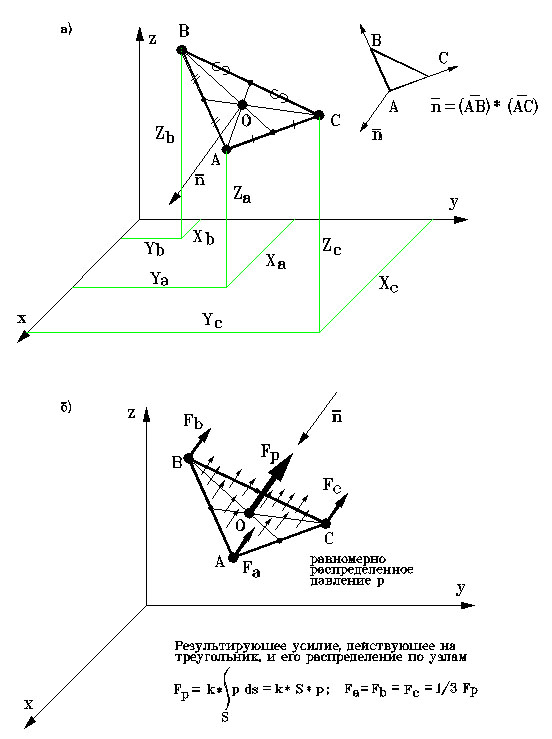
Степени свободы
|
1,2,3 - |
поступательные (соответственно X, Y и Z) точки A треугольника; |
|
4,5,6 - |
поступательные точки B треугольника; |
|
7,8,9 - |
поступательные точки C треугольника; |
|
10 - |
соответствует степени свободы, задающей давление. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки А треугольника |
м |
- Rlmax... +RLmax |
|
4,5,6 |
Начальные координаты точки В треугольника |
м |
- Rlmax... +Rlmax |
|
7,8,9 |
Начальные координаты точки С треугольника |
м |
- Rlmax... +Rlmax |
|
10 |
Масштабирующий коэффициент для пересчета давления в усилие |
Н/Па или Н/МПа |
- Rlmax... +Rlmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Суммарная величина прикладываемого к треугольнику усилия |
Н |
|
|
2 |
Текущая площадь треугольника |
м2 |
|
|
3,4,5 |
Направляющие косинусы внешней нормали к треугольнику (соответственно к осям X,Y и Z) |
|
|
3. Инерционные элементы
3.1. Вводные замечания
Инертность - это свойство любого физического тела сопротивляться изменению скорости движения. Мерой инертности тела является его масса. Математическая модель технической системы, формируемая средствами программного комплекса PRADIS, обладает конечным числом степеней свободы, мерой инертности движения по которым служит масса (для поступательных степеней свободы) или момент инерции (для угловых степеней свободы).
Описанные в этой главе элементы предназначены для отображения инерционных свойств отдельных компонентов моделируемых технических систем при одномерном, плоском и пространственном движении.
Если классифицировать элементы из библиотеки механических элементов PRADIS по признаку наличия инерционных свойств, то можно выделить три группы:
· элементы, отражающие только инерционные свойства твердых тел (им посвящена эта глава);
· элементы, обладающие инерционными свойствами наряду с отображением других свойств (например, элементы сплошной среды);
· безинерционные элементы (например, связи).
Определить, обладает ли конкретный элемент инерционными свойствами, можно, прежде всего, по его описанию в разделе "Отображаемые свойства". Кроме того, отсутствие в списке параметров элемента таких величин как масса, момент инерции или плотность, свидетельствует, что элемент неинерционен.
В большинстве случаев безинерционные элементы используются для связи элементов, обладающих инерцией. При таком соединении в узлах, общих для инерционного и безинерционного элементов, проблем, связанных с отсутствием инерционных свойств, не возникает. Если же последовательно соединяются два безинерционных элемента, то, строго говоря, записать уравнение движения по общим степеням свободы при отсутствии массы невозможно. Хотя, с учетом конечной величины шага интегрирования по времени и при условии наличия других, кроме инертности, свойств сопротивления движению по общим для соединяемых элементов степеням свободы, расчет такой системы может быть проведен. Однако он, как правило, будет осложнен достаточно мелким шагом, вызванным "дерганным" характером ускорений безинерционных узлов, приводящим к соответствующей оценке локальной погрешности интегрирования. Поэтому при формировании модели технической системы рекомендуется не оставлять без внимания диагностические сообщения, информирующие об отсутствии инерционных свойств по каким-либо степеням свободы, и добавлять по этим степеням свободы подходящие инерционные элементы из описанных в этой главе.
Справочные данные по объемам тел и плотности некоторых распространенных материалов, необходимые для вычисления массы элементов, приведены в приложении. Там же можно найти моменты инерции для тел простейшей формы.
3.2. Одномерные элементы
3.2.1.1. Одномерный инерционный элемент M
Отображаемые свойства
Инерционные свойства твердого тела при одномерном движении.
Степени свободы
|
1 - |
поступательная или вращательная, по которой задаются инерционные свойства тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
масса (для поступательного движения) или момент инерции (для вращательного движения) |
кг или кг*м2 |
0... +Rlmax |
Ограничения по использованию
Использование элемента для отражения инерционных свойств тела по вращательным степеням свободы возможно только при одномерном (кручение) или плоском движении твердого тела, когда ось вращения не изменяет своего углового положения.
В общем случае пространственного вращения для отражения инерционных свойств тела необходимо использовать пространственные инерционные элементы.
3.3. Двухмерные элементы
3.3.1.1. Плоский инерционный элемент MD
Отображаемые свойства
Инерционные свойства твердого тела при плоском движении.
Степени свободы
|
1, 2 - |
поступательные центра масс тела по осям X, Y; |
|
3 - |
вращательная центра масс. |
Примечание. Степени свободы элемента находятся в центре масс тела.
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
масса |
кг |
0... +Rlmax |
|
2 |
Момент инерции относительно оси вращения |
кг*м2 |
0... +Rlmax |
3.3.1.2. Плоский инерционный элемент со смещенным положением центра масс MJ2E
Отображаемые свойства
Инерционные свойства твердого тела при плоском движении для случая, когда центр масс тела и точка, с которой связываются степени свободы, не совпадают (рис. MJ2E_1).
Пояснения. Точка, с которой связаны степени свободы тела, обозначена здесь точкой A, центр масс тела - точкой C.
|
|
|
|
MJ2E_1. |
Степени свободы и параметры плоского инерционного элемента со смещенным положением центра масс. Степени свободы: 1, 2 – поступательные точки А по осям X, Y; 3 – вращательная точки А. Параметры: Xa, Ya – начальные координаты точки А; Xc, Yc – начальные координаты точки С (центра масс). |
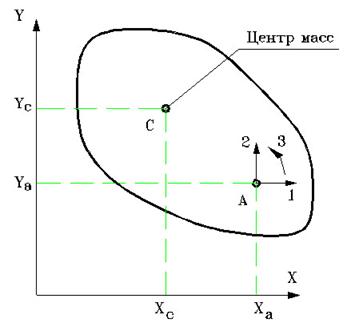
Степени свободы
|
1, 2 - |
поступательные точки A по координатным осям X, Y; |
|
3 - |
вращательная точки A. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1, 2 |
Начальные координаты точки А (xa; ya) |
м |
-RLmax... +Rlmax |
|
3, 4 |
Начальные координаты центра масс (xc; yc) |
м |
-RLmax... +Rlmax |
|
5 |
Масса тела |
кг |
0... +Rlmax |
|
6 |
Момент инерции относительно оси, проходящей через центр масс |
кг*м2 |
0... +Rlmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2 |
Перемещения центра масс по осям X, Y |
м |
|
Пример использования
Пример фрагмента описания задания, в котором для отражения инерционных характеристик одного из рычагов автомобильного замка (рис. MJ2E_2) используется элемент MJ2E:
$ DATA:
Точка O = 0. e-3, 0. e-3
Точка C1 = -35. e-3, 18. e-3
Точка C2 = 32. e-3, 27. e-3
M1 = 22.e-3 ; J1 = 1.8 e-3
M2 = 16.e-3 ; J2 = 0.85 e-3
. . .
$ FRAGMENT: Замок
# BASE: 1,2
# STRUCT:
. . .
Деталь 1 'MJ2E (5 6 7; Точка O, Точка C1, M1, J1)
Деталь 2 'MJ2E (5 6 7; Точка O, Точка C2, M2, J2)
|
|
|
|
MJ2E_2. |
Пример использования элемента MJ2E для отражения инерционных свойств подвижных частей автомобильного замка при расчете поведения замка под действием инерционных нагрузок: а) конструкция замка; б) схема, поясняющая формирование инерционной модели одного из рычагов замка. |
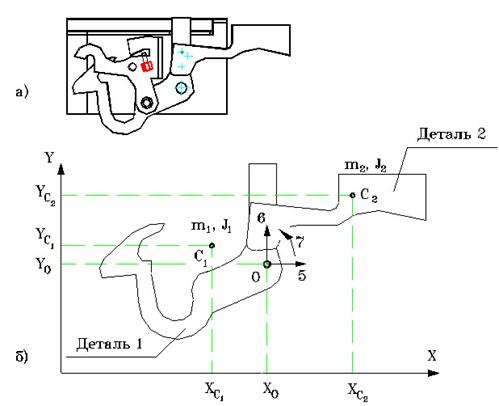
3.4. Трехмерные элементы
3.4.1.1. Пространственный инерционный элемент, отражающий поступательную составляющую инерционных свойств тела M3D
Отображаемые свойства
Поступательная составляющая инерционных свойств твердого тела при пространственном движении. Элемент рекомендуется использовать в точках, в которых либо нет угловых степеней свободы, либо инерционные свойства по угловым степеням свободы отражаются другими элементами.
Степени свободы
|
1, 2, 3 - |
поступательные по координатным осям X, Y, Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
масса |
кг |
0... +Rlmax |
3.4.1.2. Пространственный инерционный элемент, отражающий вращательную составляющую инерционных свойств сферического тела J30
Отображаемые свойства
Вращательная составляющая инерционных свойств сферического твердого тела при пространственном движении. Элемент рекомендуется использовать в точках, в которых либо нет поступательных степеней свободы, либо инерционные свойства по поступательным степеням свободы отражаются другими элементами. Кроме сферического тела, элемент может быть использован для отражения инерционных свойств любого твердого тела, имеющего одинаковые моменты инерции относительно трех главных центральных осей: куб, цилиндр с соотношением высоты к радиусу H = 1.73*R и др.
Степени свободы
|
1, 2, 3 - |
вращательные вокруг координатных осей X, Y и Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Момент инерции тела относительно оси, проходящей через центр масс |
кг*м2 |
0... +Rlmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
угловые ускорения по осям X, Y, Z |
рад/сек2 |
|
|
4,5,6 |
угловые скорости по осям X, Y, Z |
рад/сек |
|
3.4.1.3. Пространственный инерционный элемент, отражающий инерционные свойства сферического тела MJ30
Отображаемые свойства
Инерционные свойства сферического твердого тела при пространственном движении. Кроме сферического тела, элемент может быть использован для отражения инерционных свойств любого твердого тела, имеющего одинаковые моменты инерции относительно трех главных центральных осей.
Элемент является объединением элементов M3D и J3O.
Степени свободы
|
1, 2, 3 - |
поступательные по координатным осям X, Y, Z; |
|
4, 5, 6 - |
вращательные вокруг координатных осей X, Y, Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Масса |
кг |
0... +Rlmax |
|
2 |
Момент инерции тела относительно оси, проходящей через центр масс |
кг*м2 |
0... +Rlmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
угловые ускорения по осям X, Y, Z |
рад/сек2 |
|
|
4,5,6 |
угловые скорости по осям X, Y, Z |
рад/сек |
|
3.4.1.4. Пространственный инерционный элемент, отражающий инерционные свойства произвольного твердого тела MJ3D
Отображаемые свойства
Инерционные свойства произвольного твердого тела при пространственном движении. Степени свободы элемента находятся в центре масс тела (рис. MJ3D_1).
Примечание. Точка, совпадающая с центром масс тела, обозначена здесь точкой A. Вспомогательная точка, совместно с точкой A определяющая начальное положение главной центральной оси Z', обозначена точкой B. Вспомогательная точка, совместно с точками A и B определяющая плоскость расположения главной центральной оси X', обозначена точкой C. Если точка C лежит на оси AB, то моменты инерции относительно осей X' и Y' должны задаваться равными.
|
|
|
|
MJ3D_1. |
Параметры и степени свободы пространственного инерционного элемента: а) параметры: Xa, Ya, Za – начальные координаты центра масс; Xb, Yb, Zb – начальные координаты вспомогательной точки B, лежащей на главной центральной оси Z’; Xc, Yc, Zc – начальные координаты вспомогательной точки С, лежащей в плоскости X’AZ’. б) степени свободы: 1, 2, 3 – поступательные центра масс по осям X, Y, Z; 4, 5, 6 – вращательные центра масс вокруг осей X, Y, Z. |
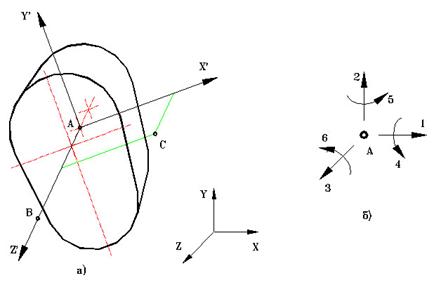
Степени свободы
|
1, 2, 3 - |
поступательные центра масс по осям X, Y, Z; |
|
4, 5, 6 - |
вращательные центра масс вокруг осей X, Y, Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1, 2, 3 |
Начальные координаты центра масс (xa; ya; za) |
м |
-RLmax ... +Rlmax |
|
4, 5, 6 |
Начальные координаты вспомогательной точки B (xb; yb; zb) |
м |
-RLmax ... +Rlmax |
|
7, 8, 9 |
Начальные координаты вспомогательной точки C (xc; yc; zc) |
м |
-RLmax ... +Rlmax |
|
10 |
Масса |
кг |
0 ... +Rlmax |
|
11, 12, 13 |
Моменты инерции относительно главных центральных осей X', Y', Z' |
кг*м2 |
0 ... +Rlmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
угловые ускорения по осям X, Y, Z |
рад/сек2 |
|
|
4,5,6 |
угловые скорости по осям X, Y, Z |
рад/сек |
|
Пример использования
Случай регулярной прецессии симметричного твердого тела (астатического гироскопа). Твердое тело, обладающее осевой симметрией (эллипсоид вращения) закреплено от поступательных перемещений в центре масс. В начальном состоянии продольная ось тела лежит в плоскости XY и отклонена от верикальной оси Y на некоторый угол. Телу сообщена начальная угловая скорость w0, направленная по оси Y. В результате тело начнет совершать инерционное движение, которое можно представить (в терминах углов Эйлера) как совокупность собственного вращения вокруг оси симметрии тела и вращения (прецессии) этой оси вокруг некоторой пространственной оси, называемой осью прецессии (рис. MJ3D_2, a).
Для рассматриваемого случая существует зависимость, связывающая угловые скорости прецессии и собственного вращения:
wпр = wсв* Jz' / (Jz' - Jx')/ cos(q),
|
, где wпр |
- угловая скорость прецессии; |
|
wсв |
- угловая скорость собственного вращения; |
|
Jz' |
- момент инерции тела относительно оси симметрии; |
|
Jx' |
- экваториальный момент инерции (Jx' = Jy'); |
|
q |
- угол между осью симметрии тела и осью прецессии. |
Начальная угловая скорость, равная w0 и направленная по оси Y, является векторной суммой wпр и wсв.
Целью расчета является проверка соответствия результатов моделирования приведенной аналитической зависимости.
Структура модели включает три элемента:
MJ3D - инерционность твердого тела;
VWN3D - элемент, задающий начальную скорость вращения точки A (центра масс тела) вокруг оси Y;
SPCW3D - датчик, "навешиваемый" на степени свободы точки A для сохранения информации, используемой в ПРВП COS3E.
Поскольку рассматриваемое твердое тело симметрично относительно своей продольной оси Z', то направления главных осей X' и Y' можно явно не определять. Поэтому в параметрах элемента MJ3D вспомогательная точка C совпадает с точкой B, и направление осей X', Y' будет принято по умолчанию.
В разделе OUTPUT вызывается одна программа расчета выходных переменных COS3E. Она подсчитывает 9 направляющих косинусов осей X', Y', Z', из которых необходимыми в данном случае являются только три последних, характеризующих текущее положение продольной оси тела Z'.
$ DATA:
Точка A = 0, 0, 0
Точка B = 0.2, 1, 0
Ось Y = 0, 0, 0, 0, 1, 0
M = 1
Jx_ = 4; Jy_ = 4; Jz_ = 1
W0 = 20
$ FRAGMENT: Гироскоп
# BASE : 1, 2, 3
# STRUCT:
Тело 'MJ3D ( 1 2 3 4 5 6; Точка A, Точка B, Точка B, M, Jx_, Jy_, Jz_)
Датчик 'SPCW3D( 1 2 3 4 5 6; 1)
Начальная скорость 'VWN3D(1 2 3 4 5 6; Ось Y,
Точка A,W0 )
# OUT:
Направляющие косинусы 'COS3E (W:Датчик;
Точка A, Точка B, Точка B)
$ RUN:
Прецессия гироскопа 'NEWMARK (END=1)
$ PRINT:
Направляющие косинусы оси Z_ 'DISP(START=1.E-10, SCALE=1;
Направляющие косинусы (7),
Направляющие косинусы (8),
Направляющие косинусы (9) )
$ END
Результаты расчета приведены на рис. MJ3D_2, б. Из них видно, что движение оси Z' носит периодический характер. Полный период, т.е. 1 оборот вокруг оси прецессии, ось Z' совершила за 1 сек. Таким образом, скорость прецессии
wпр = 1 [об/сек] = 6.28 [рад/сек]
Определяем положение оси прецессии. Направляющие косинусы оси Z':
- в крайне правом положении (t = 0 сек): 0.196, 0.981, 0;
- в крайне левом положении (t = 0.5 сек):-0.913, 0.407, 0.
Таким образом, ось прецессии лежит в плоскости XY и отклонена от оси Y влево на 27.3 град.
Учитывая, что угол наклона оси Z' к оси Y в начальном положении равен 11.3 град., из параллелограмма скоростей (рис. MJ3D_2, a) находим угловую скорость собственного вращения:
wпр = 14.70 [рад/сек]
Подставив полученные результаты в приведенное выше аналитическое соотношение для угловых скоростей прецессии и собственного вращения, убедимся, что оно удовлетворяется тождественно.
3.4.1.5. Пространственный инерционный элемент со смещенным положением центра масс MJ3E
Отображаемые свойства
Инерционные свойства произвольного твердого тела при пространственном движении. Центр масс может быть смещен относительно точки, с которой связаны степени свободы элемента (рис. MJ3E_1).
|
|
|
|
MJ3E_1. |
Степени свободы и параметры инерционного элемента со смешенным положением центра масс: а) степени свободы и направление главных центральных осей инерции; б) координаты точек. |
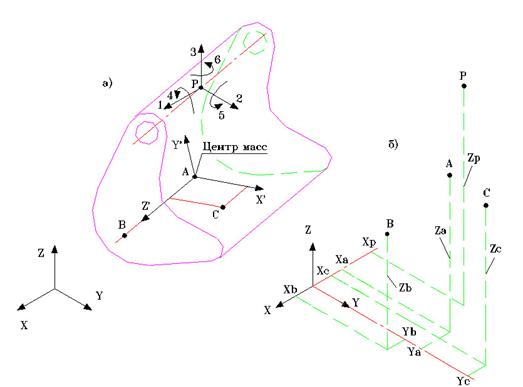
Примечание. Точка, с которой связаны степени свободы элемента, обозначена здесь точкой P. Центр масс тела обозначен точкой A. Вспомогательная точка, совместно с точкой A определяющая начальное положение главной центральной оси Z', обозначена точкой B. Вспомогательная точка, совместно с точками A и B определяющая плоскость расположения главной центральной оси X', обозначена точкой C. Если точка C лежит на оси AB, то моменты инерции относительно осей X' и Y' должны задаваться равными.
Степени свободы
|
1, 2, 3 - |
поступательные точки P по осям X, Y, Z; |
|
4, 5, 6 - |
вращательные точки P вокруг осей X, Y, Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1, 2, 3 |
Начальные координаты точки P (xp;yp;zp) |
м |
-RLmax ... +Rlmax |
|
4, 5, 6 |
Начальные координаты центра масс (xa;ya;za) |
м |
-RLmax ... +Rlmax |
|
7, 8, 9 |
Начальные координаты вспомогательной точки B (xb;yb;zb) |
м |
-RLmax ... +Rlmax |
|
10, 11, 12 |
Начальные координаты вспомогательной точки C (xc;yc;zc) |
м |
-RLmax ... +Rlmax |
|
13 |
Масса |
кг |
0 ... +Rlmax |
|
14, 15, 16 |
Моменты инерции относительно главных центральных осей X', Y', Z', имеющих начало в точке A |
кг*м2 |
0 ... +Rlmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1, 2, 3 |
угловые ускорения тела по осям X, Y, Z |
рад/сек2 |
|
|
4, 5, 6 |
угловые скорости тела по осям X, Y, Z |
рад/сек |
|
|
7, 8, 9 |
Перемещения центра масс по осям X, Y, Z |
м |
|
Пример использования
Для исследования нагруженности коленчатого вала в процессе его разгона использовалась балочно-инерционная модель коленвала (рис. MJ3E_2). Определение жесткостных и инерционных параметров этой модели проводилось с помощью конечноэлементной модели фрагмента коленвала. Жесткость балок, т.е. характеристики их поперечных сечений, подбирались на основе расчета перемещений по конечноэлементной модели при единичных воздействиях. Для отражения инерционных свойств использовались инерционные элементы со смещенным положением центра масс.
Рассматриваемый фрагмент вала можно представить состоящим из четырех частей: коренной шейки, щеки, шатунной шейки и противовеса. Для каждой из этих частей определялось положение центра масс, и инерционные свойства каждой части отображались отдельным элементом MJ3E. Ниже приводится описание структуры балочно-инерционной модели одного фрагмента коленвала.
|
|
|
|
MJ3E_2. |
Использование элемента MJ3E при построении балочно-инерционной модели коленчатого вала. |
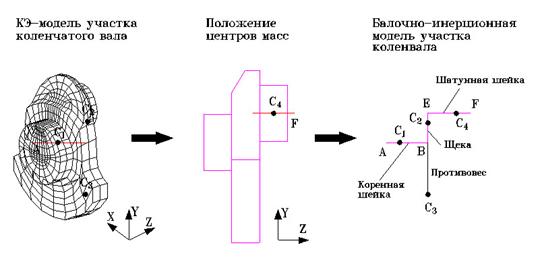
$ DATA: Колено_1
{ Координаты точек }
точка A = 0, 0, 0
точка B = 0, 0, 22.7 e-3
точка Bx= 1, 0, 22.7 e-3
точка E = 0, 30.3 e-3, 22.7 e-3
точка Ex= 1, 30.3 e-3, 22.7 e-3
точка F = 0, 30.3 e-3, 44.5 e-3
. . .
$ FRAGMENT: Колено_1
# BASE: 100
# STRUCT:
Жесткость коренной шейки 'BAL3DK ( 1, 2, 3, 4, 5, 6, 7, 8, 9, 10,11,12;
точка A, точка B, точка Bx,
М. и. п. с. коренной шейки Ix_ ,
М. и. п. с. коренной шейки Iy_ ,
М. и. п. с. коренной шейки Ik ,
Площадь п. с. коренной шейки ,
Коэфф. сдвига корен. шейки по X_ ,
Коэфф. сдвига корен. шейки по Y_ ,
Модуль Юнга, Коэффициент Пуассона,0)
Жесткость щеки 'BAL3DK ( 7, 8, 9, 10,11,12,
13,14,15, 16,17,18;
точка B, точка E, точка Bx,
М. и. п. с. щеки Ix_ ,
М. и. п. с. щеки Iy_ ,
М. и. п. с. щеки Ik ,
Площадь п. с. щеки ,
Коэфф. сдвига щеки по X_ ,
Коэфф. сдвига щеки по Y_ ,
Модуль Юнга, Коэффициент Пуассона,0)
Жесткость шатунной шейки 'BAL3DK (13,14,15, 16,17,18, 19,20,21, 22,23,24;
точка E, точка F, точка Ex,
М. и. п. с. шатунной шейки Ix_ ,
М. и. п. с. шатунной шейки Iy_ ,
М. и. п. с. шатунной шейки Ik ,
Площадь п. с. шатунной шейки ,
Коэфф. сдвига шатун. шейки по X_ ,
Коэфф. сдвига шатун. шейки по Y_ ,
Модуль Юнга, Коэффициент Пуассона,0)
Инертность коренной шейки 'MJ3E ( 1, 2, 3, 4, 5, 6;
точка A,
точка C1, точка B, точка Bx,
Масса коренной шейки,
ГМИ X_ коренной шейки ,
ГМИ Y_ коренной шейки ,
ГМИ Z_ коренной шейки )
Инертность противовеса 'MJ3E ( 7, 8, 9, 10,11,12;
точка B,
точка C3, точка B, точка Bx,
Масса противовеса,
ГМИ X_ противовеса,
ГМИ Y_ противовеса,
ГМИ Z_ противовеса)
Инертность щеки 'MJ3E (13,14,15, 16,17,18;
точка E,
точка C2, точка B, точка Bx,
Масса щеки,
ГМИ X_ щеки,
ГМИ Y_ щеки,
ГМИ Z_ щеки )
Инертность шатунной шейки 'MJ3E (19,20,21, 22,23,24;
точка F,
точка C4, точка E, точка Ex,
Масса шатунной шейки,
ГМИ X_ шатунной шейки ,
ГМИ Y_ шатунной шейки ,
ГМИ Z_ шатунной шейки
4. Связи
4.1. Общие сведения
Для описания моделей элементов, задающих свойства связей в этом разделе условно принята следующая классификация:
· элементы, описывающие зависимость силы (момента) от взаимного смещения связываемых тел ("жесткостные связи");
· элементы, описывающие зависимость силы (момента) от относительной скорости движения связываемых тел ("диссипативные связи");
· смешанные связи.
В общем случае элемент может использоваться как для задания усилия (или момента) сопротивления нарастанию относительной скорости или относительного перемещения, так и для задания движущего усилия (момента).
На рис. 4.1. показаны четыре характерных примера относительной зависимости усилия от взаимной скорости или перемещения связываемых тел:
N 1 - это характеристика обычной вязкостной (или упругой) связи, когда коэффициент демпфирования m зависит от скорости (коэффициент жесткости k зависит от перемещения). Элемент генерирует усилие, направленное на уничтожение разности между скоростями или перемещениями связываемых тел;
NN 2,3 - характеристики, определяющие начальное усилие (или момент) взаимодействия связываемых тел. Усилие, генерируемое элементом, стремится привести систему в точку, соответствующую нулевому значению усилия (указано на характеристиках стрелками);
N 4 - соответствует неустойчивой характеристике связи с отрицательным коэффициентами демпфирования и жесткости. Отклонение от положения равновесия приводит к увеличению значения усилия, увеличивающего это отклонение.
Для простейших элементов типа K, SV3K, MU и т.д. задание генераторных характеристик блокируется при анализе параметров модели элемента на допустимость. Для элементов типа табличной зависимости силы от скорости или перемещения возможность задавать такие характеристики сохранена, поэтому в каждом конкретном случае необходимо внимательно проанализировать исходные данные решаемой задачи. Если в задаваемой таблице знак относительной скорости или деформации не совпадает со знаком усилия (момента), это служит признаком генераторного режима.
|
|
|
|
Рис. 4.1. |
Различные возможные характеристики связей: 1 – характеристика, задающая обычный демпфирующий или упругий элемент; 2, 3 – характеристика элемента, задающего относительную скорость или относительное перемещение связываемых тел. Установившееся значение скорости (перемещения) указано на графиках стрелками; 4 – элемент с отрицательным демпфированием (жесткостью) и точкой неустойчивого равновесия при V=0. |

4.2. Одномерные связи
4.2.1. Жесткостные связи
4.2.1.1. Упругая связь между двумя степенями свободы K
Отображаемые свойства
Служит для задания упругой связи между двумя степенями свободы (рис.K_1). Зависимость усилия F от деформации элемента определяется законом Гука:
F = K * DX
, где F - усилие, действующее на связь со стороны первого тела;
K - коэффициент жесткости;
DX - деформация элемента.
Примечание. Элемент нельзя использовать для связывания угловых пространственных степеней свободы.
Степени свободы
|
1 - |
поступательная или вращательная для первого связываемого тела; |
|
2 - |
поступательная или вращательная для второго связываемого тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент жесткости |
Н/м или Н*м/рад |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
энергия, накопленная элементом |
Дж |
|
|
|
|
|
K_1. |
Упругая связь между двумя степенями свободы. а) степени свободы и деформация элемента: 1 – поступательная (вращательная) степень свободы первого тела; 2 – поступательная (вращательная) степень свободы второго тела; ΔX (Δφ) – деформация элемента. б) зависимость усилия (момента) от деформации связи. К – коэффициент жесткости элемента. |

4.2.1.2. Упругая связь с хрупким разрушением BRK
Отображаемые свойства
Служит для задания упругой связи между двумя телами. В тот момент, когда абсолютное значение усилия или момента достигает заданной величины, связь разрывается (считается, что элемент разрушен). Характеристика связи изображена на рис. BRK_1.
|
|
|
|
BRK_1. |
Упругая связь c хрупким разрушением. а) степени свободы и деформация элемента: 1 – поступательная (вращательная) степень свободы первого тела; 2 – поступательная (вращательная) степень свободы второго тела; ΔX (Δφ) – деформация элемента. б) параметры: К – коэффициент жесткости элемента; Fp – разрушающее усилие. |
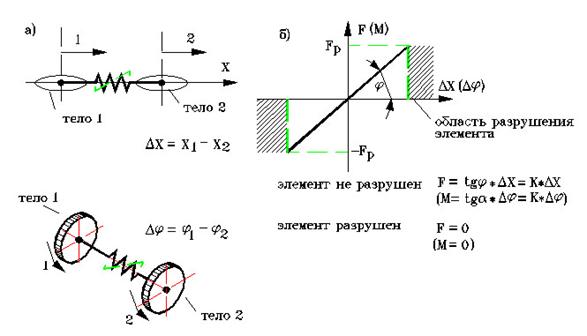
Степени свободы
|
1 - |
поступательная или вращательная для первого связываемого тела; |
|
2 - |
поступательная или вращательная для второго связываемого тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент жесткости |
Н/м или Н*м/рад |
0 ... +RLmax |
|
2 |
Разрушающее усилие |
Н или Н*м |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
энергия, накопленная элементом |
Дж |
|
|
2 |
признак разрушения элемента. Если равен 1, то элемент не разрушен. Если равен 0 - элемент разрушен |
|
|
4.2.1.3. Идеальная упруго-пластическая связь, простейший элемент сухого трения KP
Отображаемые свойства
Характеристика элемента изображена на рис. KP_1. Если деформация не превышает деформации перехода в пластическое состояние, то усилие, генерируемое элементом, подчиняется закону Гука. Если элемент перешел в пластическое состояние, то он генерирует усилие постоянной величины, равное усилию пластической деформации элемента. Обратите внимание на рис. KP_1.б., что линия разгрузки для элемента параллельна упругой линии.
С помощью элемента KP можно также моделировать сухое трение между связываемыми степенями свободы, когда силу нормального давления на соприкасающиеся поверхности и коэффициент трения для моделируемого процесса можно принять постоянными. В этом случае упругий участок характеристики определяется упругими деформациями контактного слоя в направлении движения, предшествующими моменту начала скольжения. Участок с постоянным значением силы взаимодействия соответствует проскальзыванию первой степени свободы относительно второй с силой трения:
Fтр = Fmax = f * N
, где Fтр - сила трения скольжения;
f - коэффициент трения;
N - нормальное усилие прижима.
Степени свободы
|
1 - |
поступательная или вращательная для первого связываемого тела; |
|
2 - |
поступательная или вращательная для второго связываемого тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент жесткости |
Н/м или Н*м/рад |
0 ... +RLmax |
|
2 |
Усилие пластической деформации (усилие трения) |
Н или Н/м |
0 ... +RLmax |
|
|
|
KP_1. |
Идеальная упругопластическая связь (идеальное сухое трение). а) степени свободы и деформация элемента: 1 – поступательная (вращательная) степень свободы первого тела; 2 – поступательная (вращательная) степень свободы второго тела; ΔX (Δφ) – деформация элемента. б) параметры: К – коэффициент жесткости элемента; Fp – разрушающее усилие. |
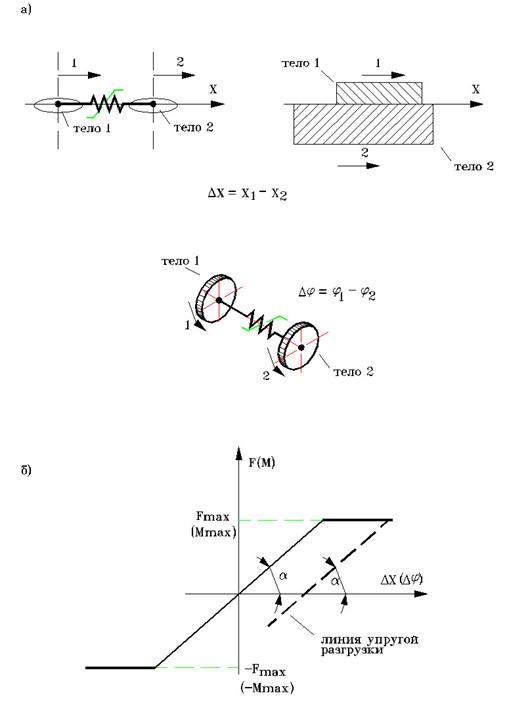
4.2.1.4. Нелинейная упругая безразмерная пружина KNL
Отображаемые свойства
Характеристика связи изображена на рис. KNL_1. Усилие, генерируемое элементом, подчиняется закону:
F = C * DX * I DX I
, где C - коэффициент пропорциональности между квадратом деформации и усилием;
DX - деформация элемента.
Степени свободы
|
1 - |
поступательная или вращательная для первого связываемого тела; |
|
2 - |
поступательная или вращательная для второго связываемого тела. |
|
|
|
KNL_1. |
Упругая связь между двумя степенями свободы с квадратичной зависимостью усилия от деформации. а) степени свободы и деформация элемента: 1 – поступательная (вращательная) степень свободы первого тела; 2 – поступательная (вращательная) степень свободы второго тела; ΔX (Δφ) – деформация элемента. б) параметры: С – коэффициент пропорциональности между квадратом деформации и усилием. |
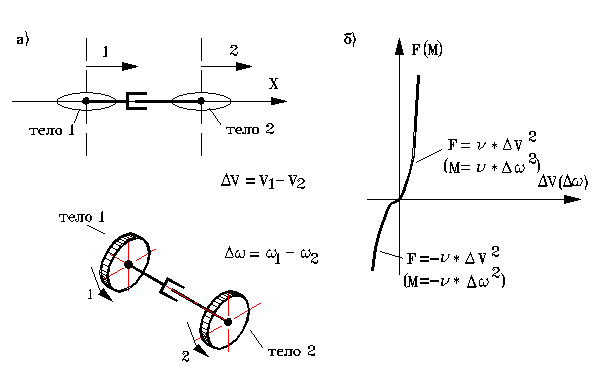
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент пропорциональности между квадратом деформации и усилием |
Н/м2 или Н*м/рад2 |
0 ... +RLmax |
4.2.1.5. Одномерный храповик со свободным прямым ходом и линейным упругим сопротивлением при обратном ходе HRP
Отображаемые свойства
Движение первого тела относительно второго в положительном направлении оси координат (прямой ход) происходит беспрепятственно. Связь препятствует отрицательному движению первого тела относительно второго, т.е. обратному ходу (рис. HRP_1).
Упругая сила сопротивления определяется по зависимости:
F = k * ( DX - DX max )
, где k - коэффициент жесткости;
DX max - максимальная достигнутая деформация элемента;
DX - текущая деформация элемента (DX =<DXmax).
Под деформацией элемента понимается разность между перемещениями первого и второго тела.
|
|
|
HRP_1. |
Одномерный храповик. а) степени свободы и деформация элемента: 1 – поступательная (вращательная) степень свободы первого тела; 2 – поступательная (вращательная) степень свободы второго тела; ΔX (Δφ) – деформация элемента; ΔXmax (Δφmax) – максимальная достигнутая деформация элемента. б) зависимость усилия от относительного смещения первого и второго тел. К – коэффициент жесткости элемента при обратном ходе. |

Степени свободы
|
1 - |
поступательная или вращательная для первого связываемого тела; |
|
2 - |
поступательная или вращательная для второго связываемого тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент жесткости |
Н/м или Н*м/рад |
0 ... +RLmax |
4.2.2. Диссипативные связи
4.2.2.1. Линейное одномерное вязкое сопротивление MU
Отображаемые свойства
Служит для задания идеальной вязкостной связи между двумя телами (рис. MU_1). Величина генерируемого элементом усилия F определяется соотношением:
F = - m * DV
, где DV - относительная скорость тел;
m - коэффициент вязкости.
|
|
|
MU_1. |
Вязкая связь между степенями свободы. а) степени свободы и деформация элемента: 1 – поступательная (вращательная) степень свободы первого тела; 2 – поступательная (вращательная) степень свободы второго тела; ΔV (Δω) – скорость деформации элемента; б) зависимость усилия от скорости деформации. μ – коэффициент вязкости элемента. |

Степени свободы
|
1 - |
поступательная или вращательная для первого связываемого тела; |
|
2 - |
поступательная или вращательная для второго связываемого тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент вязкости |
Н*с/м или Н*м*с/рад |
0 ... +RLmax |
4.2.2.2. Вязкое сопротивление с квадратичной зависимостью от скорости MUNL
Отображаемые свойства
Характеристика связи элемента изображена на рис. MUNL_1. Если деформация не превышает деформации перехода в пластическое состояние, то усилие, генерируемое элементом, подчиняется закону:
F = n * DV I DV I
, где DV - относительная скорость тел;
n - коэффициент пропорциональности между квадратом относительной скорости и усилием.
Степени свободы
|
1 - |
поступательная или вращательная для первого связываемого тела; |
|
2 - |
поступательная или вращательная для второго связываемого тела. |
|
|
|
MUNL_1. |
Связь между двумя степенями свободы с квадратичной зависимостью усилия от скорости деформации. а) степени свободы и деформация элемента: 1 – поступательная (вращательная) степень свободы первого тела; 2 – поступательная (вращательная) степень свободы второго тела; ΔV (Δω) – скорость деформации элемента; б) зависимость усилия от скорости деформации. ν – коэффициент пропорциональности между усилием и квадратом скорости. |
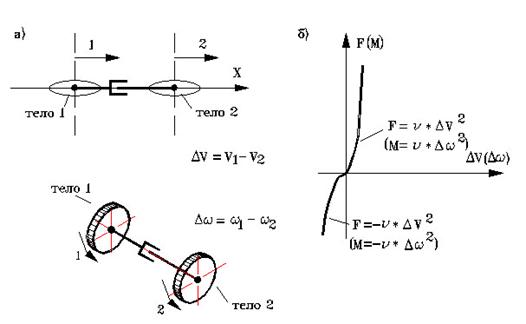
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Коэффициент пропорциональности между квадратом скорости и усилием |
Н*(сек/м)2 или Н*м* *(сек/рад)2 |
0 ... +RLmax |
4.2.2.3. Одномерная упругая связь с характеристикой деформация-усилие, задаваемой таблично SV1KT
Отображаемые свойства
Задает упругую связь между двумя телами. Характеристика связи задается в виде таблицы значений "деформация - усилие" (рис. SV1KT_1).
Правила, которые нужно соблюдать при задании таблицы:
1. Точки зависимости усилия от перемещения должны быть упорядочены по возрастанию деформации (dLi =< dLi+1). Для двух первых и двух последних точек должно выполняться условие dLi < dLi+1 ;
2. Должно быть задано как минимум две точки зависимости усилия от перемещения.
Степени свободы
|
1- |
поступательная (вращательная) для первого связываемого тела; |
|
2 - |
поступательная (вращательная) для второго связываемого тела. |
|
|
|
SV1KT_1. |
Одномерная связь, реализующая табличную зависимость усилия от деформации. Принятые обозначения: F – усилие, действующее на соединяемые тела со стороны связи; ΔL – деформация элемента. а) степени свободы модели: 1 – перемещение первого тела; 2 – перемещение второго тела; б) Табличная зависимость усилия от деформации. Каждая точка таблицы задается парой значений «деформация-усилие». За пределами интервала смещений L1-Ln усилие связи определяется экстраполяцией крайних отрезков характеристики. |
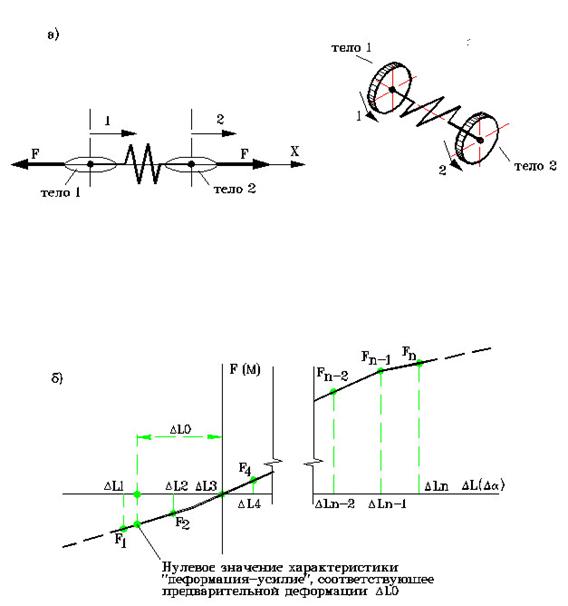
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Предварительная деформация элемента |
м |
-RLmax ... +RLmax |
|
2 |
dL1 - деформация для первой заданной точки характеристики |
м |
-RLmax ... +RLmax |
|
3 |
F1 - усилие, соответствующее деформации dL1 |
Н |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*i |
dLi - деформация для i-й заданной точки характеристики |
м |
dLi -1 ... +RLmax |
|
2*i+1 |
Fi - усилие, соответствующее деформации dLi |
Н |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*n |
dLn - деформация для n-й заданной точки характеристики |
м |
dLn -1 ... +RLmax |
|
2*n+1 |
Fn - усилие, соответствующее деформации dLn |
Н |
-RLmax ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
величина деформации элемента |
м |
|
4.2.2.4. Одномерная вязкостная связь с задаваемой таблично зависимостью усилия от скорости SV1MUT
Отображаемые свойства
Служит для задания табличной зависимости усилия, действующего со стороны первого тела на связь от относительной скорости связываемых тел DV = V1 - V2 (рис. SV1MUT_1). Усилие, действующее со стороны второго тела на связь, будет таким же по абсолютной величине, но противоположным по знаку.
Правила, которые нужно соблюдать при задании таблицы:
1. Точки зависимости усилия от скорости должны быть упорядочены по возрастанию скорости (Vi =< Vi+1 ). Для двух первых и двух последних точек должно выполняться условие Vi < Vi+1;
2. Должно быть задано как минимум две точки зависимости усилия от скорости.
Степени свободы
|
1 - |
поступательная или вращательная для первого связываемого тела; |
|
2 - |
поступательная или вращательная для второго связываемого тела. |
|
|
|
SV1MUT_1. |
Одномерная связь, реализующая табличную зависимость усилия от скорости. Принятые обозначения: F – усилие, действующее на соединяемые тела со стороны связи; ΔV – скорость первого тела относительно второго. а) степени свободы модели: 1 – перемещение первого тела; 2 – перемещение второго тела; б) Табличная зависимость усилия от скорости. Каждая точка таблицы задается парой значений «скорость-усилие». За пределами интервала смещений ΔV1- ΔVn усилие связи определяется экстраполяцией крайних отрезков характеристики. |
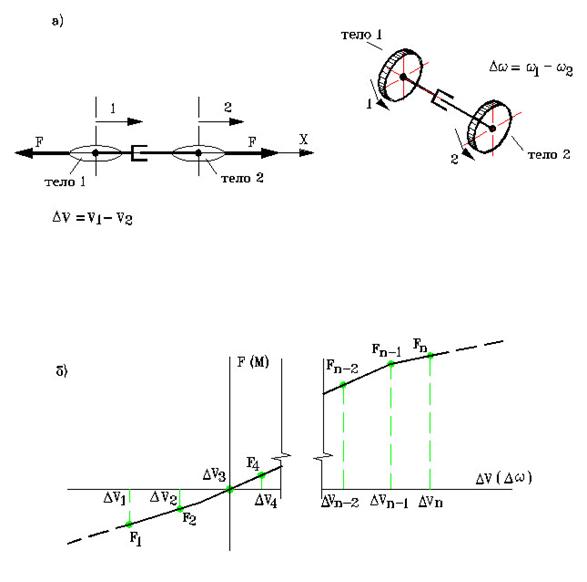
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
DV1 - скорость для первой заданной точки характеристики |
м/сек или рад/сек |
-RLmax ... +RLmax |
|
2 |
F1 - усилие (момент), соответствующее скорости DV1 |
Н или Н*м |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*i-1 |
DVi - скорость для i-й заданной точки характеристики |
м/сек или рад/сек |
DV(i -1) ... +RLmax |
|
2*i |
Fi - усилие (момент), соответствующее скорости DVi |
Н или Н*м |
-Rlmax... +RLmax |
|
|
. . . . . |
|
|
|
2*n-1 |
DVn - скорость для n-й заданной точки характеристики |
м/сек или рад/сек |
DV(n -1) ... +RLmax |
|
2*n |
Fn - усилие (момент), соответствующее скорости DVn |
Н или Н*м |
-Rlmax... +RLmax |
4.3. Двухмерные элементы
4.3.1. Жесткостные связи
4.3.1.1. Линейная упругая безразмерная пружина SV2K
Отображаемые свойства
Служит для задания упругой связи между двумя телами, движущимися в плоскости (рис. SV2K_1). Величина генерируемого элементом усилия F определяется законом Гука:
F = - K * DL
, где DL - деформация элемента;
K - коэффициент жесткости.
Примечание. Начальная длина элемента, определяемая заданными начальными координатами его концов, должна быть больше нуля.
Степени свободы
|
1,2 - |
поступательные для первого связываемого тела по осям X и Y; |
|
3,4 - |
поступательные для второго связываемого тела по осям X и Y. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1, 2 |
Начальные координаты первого связываемого тела (Xa, Ya) |
м |
-RLmax ... +RLmax |
|
3,4 |
Начальные координаты второго связываемого тела (X, Y) |
м |
-RLmax ... +RLmax |
|
5 |
Коэффициент жесткости |
Н/м или Н*м/рад |
0 ... +RLmax |
|
|
|
SV2K_1. |
Линейная идеально упругая двухмерная связь, работающая на растяжение-сжатие. а) степени свободы и геометрические параметры элемента: 1, 2 – движение точки А (1-го тела) по осям X и Y; 3, 4 - движение точки B (2-го тела) по осям X и Y; Xa, Ya – начальное положение точки А; Xb, Yb – начальное положение точки B; б) зависимость осевого усилия от относительного смещения первого и второго тел. К – коэффициент жесткости элемента. |
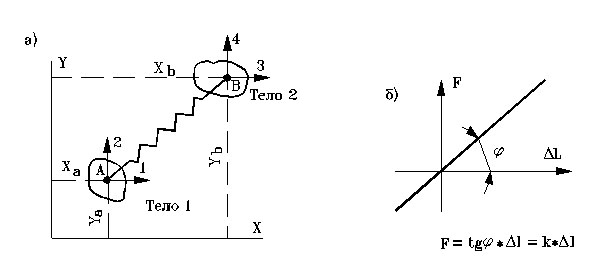
4.3.1.2. Шарнирная связь двух тел, совершающих плоское движение SV2SHR_1
Отображаемые свойства
Служит для задания идеальной (без зазоров и трения) шарнирной связи между двумя телами. Положение каждого из тел описывается, соответственно, точками A и B, совершающими плоское движение (рис. SV2SHR_1). В общем случае начальные координаты центра шарнира (точка C) не совпадают ни с точкой A, ни с точкой B.
|
|
|
SV2SHR_1. |
Двухмерная идеально упругая шарнирная связь. а) степени свободы элемента: 1, 2, 3 – поступательные и вращательная точки, описывающей движение первого тела (точка А); 4, 5, 6 - поступательные и вращательная точки, описывающей движение второго тела (точка B); б) геометрические параметры: Xa, Ya – начальное положение точки А; Xb, Yb – начальное положение точки B; Xс, Yс – начальное положение точки С; в) одно из возможных положений соединяемых связью тел в ходе движения и силы, действующие в этом случае на тела. К – коэффициент жесткости шарнира. |
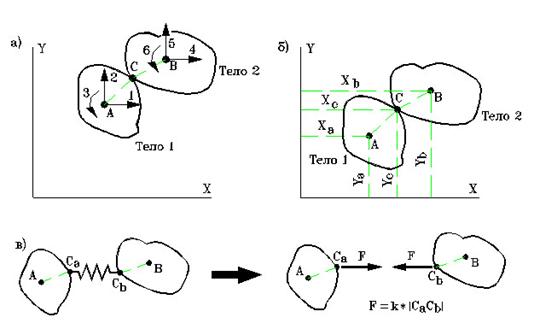
Степени свободы
|
1,2 - |
поступательные по осям X и Y точки A; |
|
3 - |
вращательная точки A; |
|
4,5 - |
поступательные по осям X и Y точки B; |
|
6 - |
вращательная точки B. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1, 2 |
Начальные координаты точки A (Xa, Ya) |
м |
-RLmax ... +RLmax |
|
3, 4 |
Начальные координаты точки B (Xb, Yb) |
м |
-RLmax ... +RLmax |
|
5, 6 |
Начальные координаты центра шарнира (Xc, Yc) |
м |
-RLmax ... +RLmax |
|
7 |
Коэффициент жесткости шарнира на растяжение-сжатие |
Н/м |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
текущая деформация шарнира (расстояние между точками Ca и Cb на рис. SV2SHR_1) |
м |
|
|
2 |
величина усилия, действующего со стороны шарнира на связываемые тела |
Н |
|
4.4. Трехмерные элементы
4.4.1. Жесткостные связи
4.4.1.1. Упругая связь между двумя точками с характеристикой деформация-усилие, задаваемой таблично SV3KT
Отображаемые свойства
Задает упругую связь (линия нагрузки совпадает с линией разгрузки) между двумя телами, совершающими пространственное движение. Деформация элемента определяется как разница между текущей длиной и длиной элемента в недеформированном состоянии. Характеристика связи задается в виде таблицы значений "деформация - усилие" (см. рис. SV3KT_1).
Правила, которые нужно соблюдать при задании таблицы:
1. Точки зависимости усилия от перемещения должны быть упорядочены по возрастанию деформации (dLi =< dLi+1). Для двух первых и двух последних точек должно выполняться условие dLi < dLi+1 ;
2. Должно быть задано как минимум две точки зависимости усилия от перемещения.
Параметр "длина элемента в недеформированном состоянии" позволяет задавать элементы с предварительными деформациями. Если этот параметр больше нуля, то начальная деформация элемента принимается равной разности между начальной длиной (определяется начальными координатами концов элемента) и длиной элемента в недеформированном состоянии. Если параметр меньше или равен 0, то считается, что в начальном состоянии элемент не деформирован.
Примечание. Начальная длина элемента, определяемая заданными начальными координатами его концов, должна быть больше нуля.
|
|
|
SV3KT_1. |
Пространственная связь, реализующая табличную зависимость усилия от деформации. Принятые обозначения: F – усилие, действующее на связь со стороны соединяемых тел; Δl – осевая деформация элемента. а) степени свободы модели и параметры, определяющие начальное расположение элемента в пространстве: 1, 2, 3 – перемещение первого тела по осям X, Y, Z; 4, 5, 6 - перемещение второго тела по осям X, Y, Z; Xa, Ya, Za – начальные координаты точки A; Xb, Yb, Zb – начальные координаты точки B. б) Определение осевой деформации элемента; в) Табличная зависимость усилия от деформации. Каждая точка таблицы задается парой значений «деформация-усилие». За пределами интервала деформаций Δl1- Δln усилие связи определяется экстраполяцией крайних отрезков характеристики. |
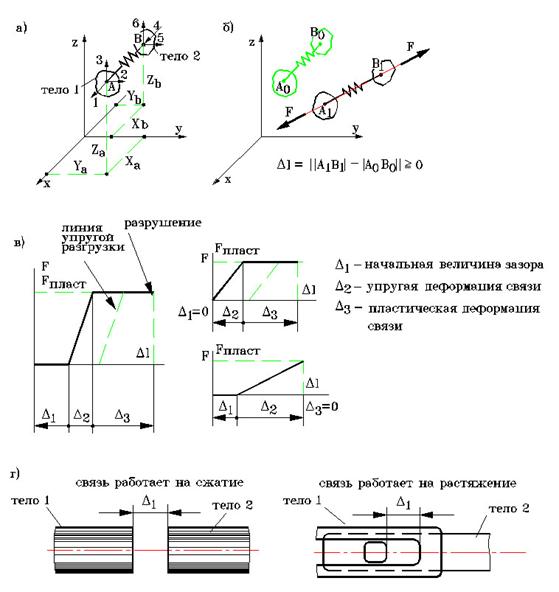
Степени свободы
|
1,2,3 - |
поступательные по осям X, Y и Z первого тела; |
|
4,5,6 - |
поступательные по осям X, Y и Z второго тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты первого связываемого тела (Xa,Ya,Za) |
м |
-RLmax ... +RLmax |
|
4,5,6 |
Начальные координаты второго связываемого тела (Xb,Yb,Zb) |
м |
-RLmax ... +RLmax |
|
7 |
Длина элемента в недеформированном состоянии |
м |
-RLmax ... +RLmax |
|
8 |
dL1 - деформация для первой заданной точки характеристики |
м |
-RLmax ... +RLmax |
|
9 |
F1 - усилие, соответствующее деформации dL1 |
Н |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*i+6 |
dLi - деформация для i-й заданной точки характеристики |
м |
dLi -1 ... +RLmax |
|
2*i+7 |
Fi - усилие, соответствующее деформации dLi |
Н |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*n+6 |
dLn - деформация для n-й заданной точки характеристики |
м |
dLn -1 ... +RLmax |
|
2*n+7 |
Fn - усилие, соответствующее деформации dLn |
Н |
-RLmax ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
величина деформации элемента |
м |
|
|
2 |
осевая сила в элементе |
Н |
|
Пример использования
Решается задача передачи усилия со стороны передней подвески на кузов автомобиля в местах крепления основных рычагов при различных режимах движения автомобиля. Конструктивная схема подвески приведена на рис.SV3KT_2.а. Положение характерных точек подвески (рис. SV3KT_2.б.) в системе координат автомобиля:
Точка A = 0.014 , -0.518 , 0.596 ;
Точка B1= 0.0105, -0.5332, 0.4383;
Точка B2= 0.0082, -0.5413, 0.3542;
Точка C = 0.002 , -0.566 , 0.098 ;
Точка D = 0.060 , -0.352 , -0.028 ;
Точка E = 0.015 , -0.587 , -0.047 ;
Точка F = 0.000 , -0.666 , -0.040 ;
Точка G =-0.465 , -0.352 , 0.007 ;
Точка H =
Точка I = 0.138, -0.560, 0.341 ;
Точка J = 0.138, -0.025, 0.341 ;
Примечание. Модель подвески в рассматриваемой задаче существенно упрощена для того, чтобы ее текст стал более обозримым. С этой целью принято, что ось пружины совпадает с осью амортизатора. Места крепления кронштейна пружины и кронштейна рулевой тяги к стойке амортизатора совпадают (точка B2). Растяжка имеет прямолинейную ось, поперечные сечения всех рычагов симметричны (ориентация поперечного сечения в пространстве безразлична). Нагрузка на подвеску со стороны дороги передается через балочный элемент, моделирующий упругие свойства колеса. Податливость шарниров не учитывается. Материал всех элементов подвески - сталь.
Телескоп амортизатора представлен в модели схемой, изображенной отдельно на рис. SV3KT_2.г. Балочные элементы B1B2 и B2C используются для моделирования изгибной и продольной жесткости стойки амортизатора. На элемент B2C замыкается продольное усилие пружины AB (в более подробной модели подвески между точкой B и нижним концом пружины должны были бы присутствовать элементы, моделирующие кронштейн пружины).
|
|
|
SV3KT_2. |
Модель передней подвески легкового автомобиля: а) конструктивная схема подвески; б) структура расчетной схемы и обозначения характерных точек; в) нумерация степеней свободы; г) структура модели телескопического гидроамортизатора; д) характеристика сжатия пружины и скоростная характеристика амортизатора. |
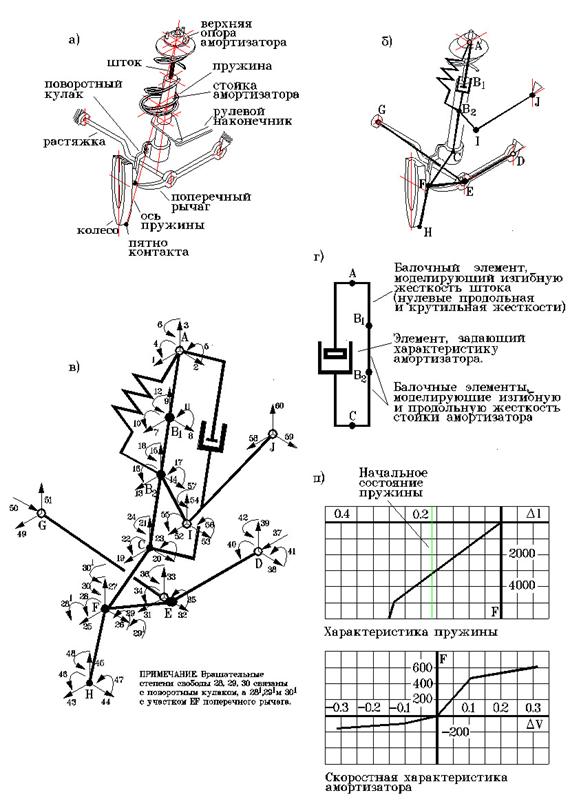
Для моделирования изгибной жесткости штока используется балочный элемент AB1. Нулевая продольная жесткость этого элемента позволяет точке A двигаться свободно вдоль оси амортизатора (линии, соединяющей точки B и C). Смещению точки A в направлении, перпендикулярном оси амортизатора, будет препятствовать изгибная жесткость балок AB1 и B1B2. При этом автоматически учитывается изменение изгибной жесткости балочного элемента AB1 в зависимости от изменения его длины. Поскольку шток может свободно вращаться вокруг своей оси, крутильная жесткость балки AB1 также принимается нулевой.
Для моделирования пружины сжатия используется элемент SV3KT, а зависимость усилия в амортизаторе от скорости моделируется элементом SV3MUT. Характеристика пружины и скоростная характеристика амортизатора приводятся на рис.SV3KT_2.д.
Декомпозиция модели подвески на элементы показана на рис. SV3KT_3.а.
Требуется найти усилия, передаваемые на кузов автомобиля в месте крепления штока при вертикальном воздействии на колесо в виде синусоиды с различными амплитудой и частотой.
Текст описания модели:
$ DATA:
{ Параметры материалов }
Модуль упругости стали = 2.E11
Коэффициент Пуассона = 0.3
Плотность стали = 7800
Сталь = Модуль упругости стали,
Коэффициент Пуассона,
Плотность стали
{ Геометрия конструкции }
Точка A = 0.014 , -0.518 , 0.596 {верхняя точка штока }
Точка B1= 0.0105, -0.5332, 0.4383 {направляющая штока }
Точка B2= 0.0082, -0.5413, 0.3542 {нижний конец пружины}
Точка C = 0.002 , -0.566 , 0.098 {низ стойки }
Точка D = 0.060 , -0.352 , -0.028 {крепление поп.рычага
к кузову}
Точка E = 0.015 , -0.587 , -0.047 {соединение растяжки
и поперечного рычага}
Точка F = 0.000 , -0.666 , -0.040 {шаровая опора }
Точка G =-0.465 , -0.352 , 0.007 {крепление растяжки к
кузову }
Точка H = 0, -0.739 , -0.250 {пятно контакта }
Точка I = 0.138, -0.560 , 0.341 {конец поворотного
рычага }
Точка J = 0.138, -0.025, 0.341 {соединение рулевого
наконечника с рейкой}
Ось шарнира D = 0.043, -0.349, -0.027,
0.077, -0.355, -0.029
{ Геометрические моменты инерции и площади поперечного сечения рычагов :
Jx, Jy, Jk, S }
Сечение штока = 1.15e-8, 1.15e-8, 0.00, 0.0 ;
Сечение стойки = 1.40e-7, 1.40e-7, 2.8e-7, 5.50e-4;
Сечение поворотного кронштейна =
3.20e-8, 3.20e-8, 1.5e-8, 3.45e-4;
Сечение поперечного рычага =
1.90e-8, 1.90e-8, 3.3e-8, 4.80e-4;
Сечение поворотного кулака =
4.00e-8, 4.00e-8, 8.0e-8, 4.50e-4;
Сечение колеса =
3.00e-8, 3.00e-8, 6.0e-8, 4.00e-4;
{Жесткость шарнира поперечный рычаг - кузов:
Kl Kr Kи Kk }
Жесткость шарнира D = 6.8 e5, 1.7 e6, 100, 100
{Жесткость кузова в месте крепления штока к кузову
Kx Ky Kz }
Жесткость кузова = 1e5, 1e5, 1e5
{ Параметры растяжки и рулевого наконечника:
Масса, lm, S, E}
Параметры растяжки = 1.4, 0.5, 4.15e-4, 2.e11
Параметры рулевого наконечника
= 1.0, 0.5, 4.00e-4, 2.e11
{ Характеристика пружины и амортизатора}
Характеристика пружины = -0.173, - 3195,
0, 0,
1, 0
Начальная длина пружины = 0.418;
Скорост. характер. амортизатора =
-0.314, - 153,
-0.105, - 94,
0 , 0,
0.105, 471,
0.314, 612
Ограничение хода отбоя =
0, 0,
94.E-3, 0,
95.E-3, 1.E4
{ Сосредоточенные массы }
Масса A = 0.1 ; Момент инерции шарнира A = 0.01;
Масса B2 = 0.1 ; Масса D = 0. ;
Масса E = 0.21; Масса F = 1.5;
Масса G = 0. ; Масса H = 5.3;
Масса I = 0.05; Масса J = 0. ;
{ Воздействие на колесо }
Амплитуда = 0.023; Период = 0.13; Фаза = 0
Амплитуда 1= 0.071; Период 1= 0.43; Фаза 1= 0
Жесткость шины = 1.E5;
{ Изображение подвески на экране в ходе расчета}
Параметры изображения = 1.5, 0, 0, 0,
0.3, -1, 0,
0, 2, 0,
0
Диаметр пружины = 0.35; Количество витков = 4;
Диаметр амортизатора = 0.15;
Относительные размеры = 0.15, 0.7;
Диаметр шарнира = 0.05;
Размеры опоры = 0.1, 2, Диаметр шарнира;
$ FRAGMENT: Подвеска
# BASE:
49, 50, 51, {крепление к кузову растяжки }
58, 59, 60, {крепление к кузову рулевого наконечника}
1000
# STRUCTURE:
{ Гидроамортизатор }
Кузов 'KBASE ( 1 2 3; Жесткость кузова)
Шток 'BAL3DJ ( 1 2 3 4 5 6 7 8 9 10 11 12;
Точка A, Точка B1, Точка A,
Сечение штока, Сталь)
Верх стойки 'BAL3DJ ( 7 8 9 10 11 12 13 14 15 16 17 18;
Точка B1, Точка B2, Точка B1,
Сечение стойки, Сталь)
Низ стойки 'BAL3DJ (13 14 15 16 17 18 19 20 21 22 23 24;
Точка B2, Точка C, Точка B2,
Сечение стойки, Сталь)
Ограничение выхода штока'SV3KT ( 1 2 3 7 8 9;
Точка A, Точка B1, 0,
Ограничение хода отбоя )
Амортизатор 'SV3MUT ( 1 2 3 19 20 21;
Точка A, Точка C,
Скорост. характер. амортизатора)
Пружина 'SV3KT ( 1 2 3 13 14 15;
Точка A, Точка B2,
Начальная длина пружины,
Характеристика пружины)
Поворотный кронштейн ' BAL3DJ (13 14 15 16 17 18 52 53 54 55 56 57;
Точка B2, Точка I, Точка B2,
Сечение поворотного кронштейна,
Сталь)
Рулевой наконечник 'STERG (52 53 54 58 59 60;
Точка I, Точка J,
Параметры рулевого наконечника )
Попереч. рычаг участок FE 'BAL3DJ (25 26 27 281 291 301 31 32 33 34 35 36;
Точка F, Точка E, Точка F,
Сечение поперечного рычага, Сталь)
Попереч. рычаг участок ED'BAL3DJ (31 32 33 34 35 36 37 38 39 40 41 42;
Точка E, Точка D, Точка E,
Сечение поперечного рычага, Сталь)
Шарнир поперечн.рычаг_кузов 'SH3CP (37 38 39 40 41 42
1000 1000 1000 1000 1000 1000;
Ось шарнира D,
Жесткость шарнира D)
Растяжка '
STERG (31 32 33 49 50 51;
Точка E, Точка G,
Параметры растяжки)
Поворотный кулак 'BAL3DJ (19 20 21 22 23 24
25 26 27 28 29 30;
Точка C, Точка F, Точка C,
Сечение поворотного кулака,
Сталь)
Диск колеса 'BAL3DJ (25 26 27 28 29 30
43 44 45 46 47 48;
Точка F, Точка H, Точка F,
Сечение колеса, Сталь)
Воздействие на колесо 'SSIN0 (45 451;
Амплитуда 1,Период 1,Фаза 1,
Жесткость шины)
'SSIN0 (451 1000;
Амплитуда,Период, Фаза,
Жесткость шины)
Масса опоры A' M3D ( 1 2 3; Масса A)
Инерция опоры A' J3O ( 4 5 6;
Момент инерции шарнира A)
Масса B2 ' M3D (13 14 15; Масса B2)
Масса опоры D' M3D (37 38 39; Масса D)
Масса шарнира E' M3D (31 32 33; Масса E)
Масса ступицы ' M3D (25 26 27; Масса F)
Масса опоры G' M3D (49 50 51; Масса G)
Масса колеса ' M3D (43 44 45; Масса H)
Масса шарнира I' M3D (52 53 54; Масса I)
Масса опоры J' M3D (58 59 60; Масса J)
# OUTPUT :
Реакция в шарнире A 'ROUT (I:Кузов(1),
I:Кузов(2),
I:Кузов(3); 1)
Воздействие на подвеску 'X (I:Воздействие на колесо;1)
Вертикальное смещение колеса 'X (45; 1)
Вертикальная скорость колеса 'V (45; 1)
Перемещение точки Ex 'X (31; 1)
Перемещение точки Ey 'X (32; 1)
Перемещение точки Ez 'X (33; 1)
#MAP:
$ SHOW:
Шток амортизатора 'LAYER (Шток ; Параметры изображения)
Стойка амортизатора 'LAYER (Верх стойки,
Низ стойки,
Поворотный кулак,
Масса B2 (POINT; Точка B2,
Диаметр шарнира, 1);
Параметры изображения)
Поперечный рычаг 'LAYER (Попереч. рычаг участок FE,
Попереч. рычаг участок ED,
Масса шарнира E (POINT;
Точка E,
Диаметр шарнира, 1);
Параметры изображения)
Растяжка 'LAYER (Растяжка ;
Параметры изображения)
Поворотный кронштейн'LAYER (Поворотный кронштейн;
Параметры изображения)
Рулевой наконечник 'LAYER (Рулевой наконечник;
Параметры изображения)
Пружина 'LAYER (Пружина (PRUG;
Диаметр пружины,
Количество витков);
Параметры изображения)
Амортизатор 'LAYER (Амортизатор (AMORT;
Диаметр амортизатора,
Относительные размеры);
Параметры изображения)
Колесо 'LAYER (Диск колеса;
Параметры изображения)
Опоры 'LAYER ((OPORAD;
Точка A, Размеры опоры),
(OPORAD;
Точка D, Размеры опоры),
(OPORAD;
Точка G, Размеры опоры),
(OPORAD;
Точка J, Размеры опоры);
Параметры изображения)
Шарниры 'LAYER (Масса шарнира I (POINT;
Точка I,
Диаметр шарнира, 1),
Масса шарнира E (POINT;
Точка E,
Диаметр шарнира, 1);
Параметры изображения)
$ RUN:
Колебания подвески 'SHTERM (END=10, CONTROL=1.E-5, SCALE=1)
$ PRINT :
Результат 'DISP (;
Вертикальное смещение колеса,
Вертикальная скорость колеса,
Реакция в шарнире A,
Воздействие на подвеску)
$ END
Результаты расчета усилия, передаваемого на кузов со стороны подвески, приводятся на рис. SV3KT_3.б.
|
|
|
SV3KT_3. |
а) декомпозиция модели подвески на элементы; б) результаты расчета усилия, передаваемого на кузов со стороны подвески. |
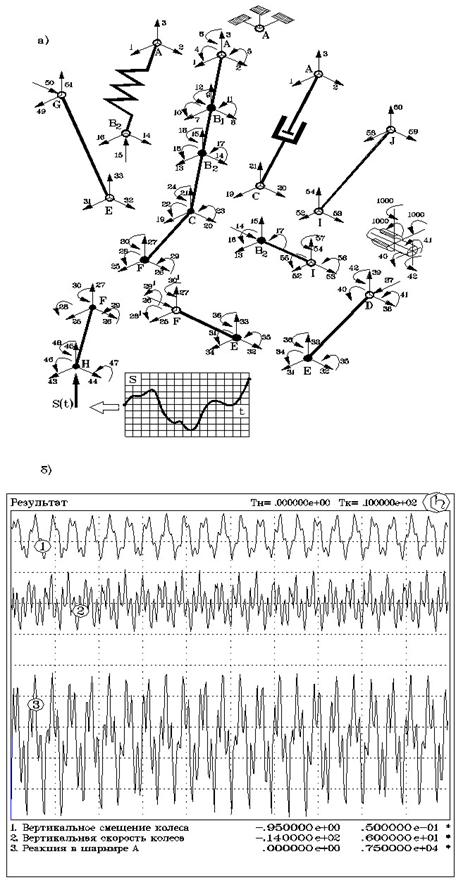
4.4.1.2. Управляемая упругая связь между двумя точками с характеристикой деформация-усилие, задаваемой таблично SV3KTU
Отображаемые свойства
Задает упругую связь (линия нагрузки совпадает с линией разгрузки) между двумя телами, совершающими пространственное движение. Деформация элемента определяется как разница между текущей длиной и длиной элемента в недеформированном состоянии. Номинальная характеристика связи (характеристика связи элемента в случае, если потенциал управляющего узла равен 1) задается в виде таблицы значений "деформация - усилие" (аналогично элементу SV3KT, см. рис. SV3KT_1). Правила, которые нужно соблюдать при задании таблицы:
1. Точки зависимости усилия от перемещения должны быть упорядочены по возрастанию деформации (dLi =< dLi+1). Для двух первых и двух последних точек должно выполняться условие dLi < dLi+1 ;
2. Должно быть задано как минимум две точки зависимости усилия от перемещения.
Текущее усилие, с которым связь воздействует на соединяемые тела, определяется произведением потенциала управляющего узла на номинальное усилие (получается из характеристики связи в соответствии с текущим значением деформации).
Параметр "длина элемента в недеформированном состоянии" позволяет задавать элементы с предварительными деформациями. Если этот параметр больше нуля, то начальная деформация элемента принимается равной разности между начальной длиной (определяется начальными координатами концов элемента) и длиной элемента в недеформированном состоянии. Если этот параметр меньше или равен 0, то считается, что в начальном состоянии элемент не деформирован.
Основные применения модели элемента SV3KTU:
· Деформированные в начальном состоянии пружины. Для моделирования такого рода элементов можно использовать и элемент SV3KT. Однако, в этом случае в начальный момент времени моделируемая система будет испытывать удар, определяемый усилием начального поджатия пружины. Используя элемент SV3KTU, можно в значительной степени смягчить такого рода удар, повышая потенциал ("скорость") управляющего узла от нуля до единицы за счет одного из источников управления скоростью (VTR0, VTABL0 и т.д.) не мгновенно, а за некоторый конечный промежуток времени;
· Пространственные источники усилия различной формы. В этом случае задается независимая от перемещения характеристика элемента, а к управляющему узлу присоединяется источник потенциала требуемой формы. Генерируемое усилие будет направлено вдоль оси элемента.
Примечание. Начальная длина элемента, определяемая заданными начальными координатами его концов, должна быть больше нуля.
Степени свободы
|
1,2,3 - |
поступательные по осям X, Y и Z первого тела; |
|
4,5,6 - |
поступательные по осям X, Y и Z второго тела; |
|
7 - |
управляющая степень свободы. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты первого связываемого тела (Xa,Ya,Za) |
м |
-RLmax ... +RLmax |
|
4,5,6 |
Начальные координаты второго связываемого тела (Xb,Yb,Zb) |
м |
-RLmax ... +RLmax |
|
7 |
Длина элемента в недеформированном состоянии |
м |
-RLmax ... +RLmax |
|
8 |
dL1 - деформация для первой заданной точки характеристики |
м |
-RLmax ... +RLmax |
|
9 |
F1 - усилие, соответствующее деформации dL1 |
Н |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*i+6 |
dLi - деформация для i-й заданной точки характеристики |
м |
dLi -1 ... +RLmax |
|
2*i+7 |
Fi - усилие, соответствующее деформации dLi |
Н |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*n+6 |
dLn - деформация для n-й заданной точки характеристики |
м |
dLn -1 ... +RLmax |
|
2*n+7 |
Fn - усилие, соответствующее деформации dLn |
Н |
-RLmax ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
величина деформации элемента |
м |
|
|
2 |
осевая сила в элементе |
Н |
|
4.4.1.3. Связь между двумя телами с односторонней упруго-пластической характеристикой, начальным зазором и разрушением SV3UKP
Отображаемые свойства
Задает пространственную связь между двумя телами, в общем случае характеризующуюся (см. рис. SV3UKP_1):
· величиной начального зазора между поверхностями связываемых тел;
· участком, соответствующим упругой деформации связи;
· участком, соответствующим пластической деформации, когда усилие связи становится предельным и остается неизменным в ходе дальнейшего увеличения деформации;
· предельной деформацией, когда элемент разрушается.
Связь накладывается только на деформации растяжения-сжатия (элемент нельзя подвергнуть изгибу или кручению). Обратите внимание, что линия разгрузки элемента, достигшего пластических деформаций, параллельна упругому участку характеристики.
Примечание. Начальная длина элемента, определяемая заданными начальными координатами его концов, должна быть больше нуля.
Степени свободы
|
1,2,3 - |
поступательные по осям X, Y и Z точки A, принадлежащей первому телу; |
|
4,5,6 - |
поступательные по осям X, Y и Z точки B, принадлежащей второму телу. |
|
|
|
SV3UKP_1. |
Упруго-пластическая пространственная связь с зазором и возможностью разрушения. Принятые обозначения: F – усилие, действующее на связь со стороны соединяемых тел; Δl – осевая деформация элемента. а) степени свободы модели и параметры, определяющие начальное расположение элемента в пространстве: 1, 2, 3 – перемещение первого тела по осям X, Y, Z; 4, 5, 6 - перемещение второго тела по осям X, Y, Z; Xa, Ya, Za – начальные координаты точки A; Xb, Yb, Zb – начальные координаты точки B. б) Определение осевой деформации элемента; в) Параметры, определяющие зависимость усилия от деформации. Характеристика элемента в общем случае и частные случаи характеристики (отсутствие начального зазора и отсутствие участка пластических деформаций); г) параметр, определяющий на растяжение или на сжатие работает связь; параметр меньше 0 – связь работает на сжатие; параметр больше 0 – связь работает на растяжение; |
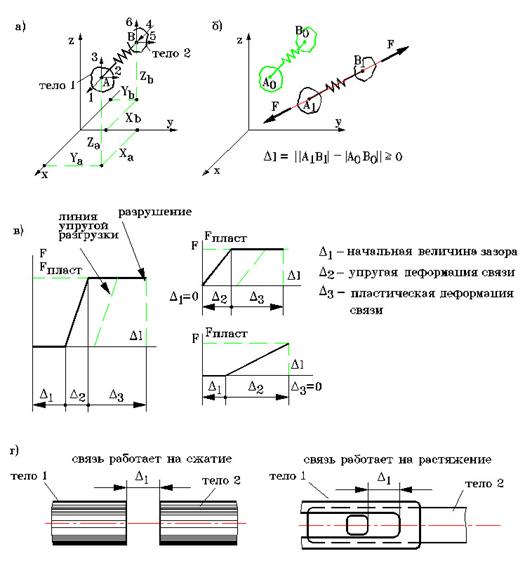
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты первого связываемого тела (Xa,Ya,Za) |
м |
-RLmax ... +RLmax |
|
4,5,6 |
Начальные координаты второго связываемого тела (Xb,Yb,Zb) |
м |
-RLmax ... +RLmax |
|
7 |
Величина усилия, определяющая переход в пластическое состояние |
Н |
0 ... +RLmax |
|
8 |
Величина начального зазора |
м |
0 ... +RLmax |
|
9 |
Упругое смещение после выборки зазора |
м |
0 ... +RLmax |
|
10 |
Продолжительность участка пластической деформации до момента разрушения |
м |
0 ... +RLmax |
|
11 |
Признак, указывающий работает элемент на растяжение (>0) или сжатие (<0). Если этот параметр равен 0, связь считается отсутствующей |
м |
-RLmax... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
величина деформации элемента |
м |
|
|
2 |
осевая сила в элементе |
Н |
|
4.4.1.4. Линейный упругий элемент, закрепляющий точку по трем степеням свободы КBASE
Отображаемые свойства
Накладывает упругие ограничения на перемещения пространственной точки по трем поступательным степеням свободы. Для каждой из закрепляемых степеней свободы задается своя величина коэффициента жесткости.
Степени свободы
1,2,3 - поступательные по осям X, Y и Z.
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Жесткость связи по оси X |
H/м |
0 ... +RLmax |
|
2 |
Жесткость связи по оси Y |
H/м |
0 ... +RLmax |
|
3 |
Жесткость связи по оси Z |
H/м |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
энергия, накопленная элементом |
Дж |
|
|
2 |
суммарная реакция |
Н |
|
|
3 |
величина абсолютного перемещения |
м |
|
Пример использования
См. пример из раздела 4.4.1.1.
4.4.1.5. Универсальный шарнир UNVRS
Отображаемые свойства
Модель предназначена для воспроизведения свойств соединения двух абсолютно жестких тел перемещающихся в пространстве в том случае, когда разрешено их относительное вращение вокруг двух взаимно перпендикулярных осей, каждая из которых жестко связана с одним из тел. Физически такое соединение эквивалентно универсальному шарниру (карданному соединению двух тел). В точке соединения тел воспроизводятся упругие и вязкие характеристики связи при вращении вокруг осей разрешенного поворота.
Два абсолютно жестких тела, пространственное движение которых определяется перемещениями (поступательными и угловыми) соответственно точек B1 и B2, соединены связью, разрешающей относительное вращение вокруг двух взаимно перпендикулярных осей z, x. Ось z жестко связана с телом 1, ось x жестко связана с телом 2. Все остальные относительные перемещения и вращения запрещены. Текущие положения осей z, x полностью определяются угловым положением соединяемых тел. Начальное положение оси z определяется заданием точек A и D. Точка С совместно с точками А, D определяет начальное положение плоскости Axz (плоскости крестовины).
Центр связи расположен в точке A. В общем случае точки B1 и B2 могут совпадать с точкой A. Точки B1 и B2 могут не быть центрами масс тел.
Взаимодействие между телами в точке связи определяется характеристиками связи, определенными в подвижной локальной системе координат связи (ЛСКс) Axyz. Локальная ось z всегда параллельна оси z1 системы координат ЛСК1, связанной с телом 1. Локальная ось x всегда параллельна оси x2 системы координат ЛСК2, связанной с телом 2. Текущее положение оси y ЛСКс перпендикулярно плоскости расположения осей z,x (плоскость расположения крестовины карданного соединения). Начало координат ЛСК1 и ЛСК2 помещено в точки B1 и B2, а начальное угловое положение совпадает с начальным угловым положением ЛСКс.
Взаимодействие между телами в точке связи определяется следующими характеристиками связи:
· Жесткостями связи при относительном повороте тел вокруг осей z,x связи (крутильной жесткостью связи). Жесткость связи задается таблицей зависимости упругого крутящего момента вокруг оси от угла поворота 1 тела относительного 2-го вокруг этой оси.
· Вязкостями связи при относительном вращении вокруг осей z,x (крутильная вязкость). Вязкость связи задается таблицей зависимости диссипативного крутящего момента вокруг оси от угловой скорости вращения 1-го тела относительно 2-го вокруг этой оси.
Исключение (минимизация) относительных перемещений вдоль всех осей и вращения вокруг оставшейся оси (оси y) осуществлено путем задания:
· большой жесткости в осевых направлениях (все жесткости считаем равными между собой) – K=Kx=Ky=Kz.
· большой угловой (крутильной) жесткости вокруг оси y - KFy
Степени свободы
|
1, 2, 3 |
Поступательные точки B1 в направлении глобальных координатных осей X,Y,Z. |
|
4, 5, 6 |
Вращательные точки B1 относительно глобальных координатных осей X,Y,Z |
|
7, 8, 9 |
Поступательные точки B2 в направлении глобальных координатных осей X,Y,Z. |
|
10, 11, 12 |
Вращательные точки B2 относительно глобальных координатных осей X,Y,Z |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки B1 |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки B2 |
м |
- Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки A |
м |
- Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки D |
м |
- Rlmax... +RLmax При совпадении с координатами точки A начальное положение оси связи совпадает с направлением оси Z глобальной системы координат |
|
13,14,15 |
начальные координаты точки С |
м |
- Rlmax... +RLmax Если лежит на оси AD, то начальное положение осей x,y определяется по умолчанию: поворотом глобальной системы координат вокруг оси, перпендикулярной плоскости расположения осей Z,z до их совмещения. |
|
16 |
Жесткость связи при в направлении любой оси, проходящей через точку A (оси запрещенных перемещений) |
H/м |
> 0 Рекомендуется 108 – 1010. |
|
17 |
Угловая (крутильная) жесткость связи вокруг оси, перпендикулярной плоскости расположения крестовины (ось запрещенного поворота) |
H·м/рад |
> 0 Рекомендуется 105 – 107. |
|
18 |
Маркер (численная величина, отделяющая одну таблицу значений от другой) |
|
- Rlmax... +RLmax |
|
19… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругого крутящего момента от угла поворота 1-го тела относительно 2-го вокруг оси z. В каждой паре чисел: первое число - угол поворота 1-го тела относительно 2-го вокруг оси связи [радианы] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угла поворота должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угла аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 18 |
|
… |
Таблица 2 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкого крутящего момента от угловой скорости 1-го тела относительно 2-го вокруг оси z . В каждой паре чисел: первое число – угловая скорость 1-го тела относительно 2-го вокруг оси связи [радианы в секунду] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угловой скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угловой скорости аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 18 |
|
… |
Таблица 3 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругого крутящего момента от угла поворота 1-го тела относительно 2-го вокруг оси x. В каждой паре чисел: первое число - угол поворота 1-го тела относительно 2-го вокруг оси связи [радианы] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угла поворота должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угла аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 18 |
|
… |
Таблица 4 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкого крутящего момента от угловой скорости 1-го тела относительно 2-го вокруг оси x . В каждой паре чисел: первое число – угловая скорость 1-го тела относительно 2-го вокруг оси связи [радианы в секунду] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угловой скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угловой скорости аппроксимация должна обеспечивать нулевое значение момента. |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Полная осевая деформация связи |
м |
|
|
2 |
Угловая деформация связи вокруг оси z |
рад |
|
|
3 |
Угловая деформация связи вокруг оси x |
рад |
|
|
4 |
Угловая деформация связи вокруг оси y |
рад |
|
|
5 |
Угловая скорость относительного вращения вокруг оси z |
рад/с |
|
|
6 |
Угловая скорость относительного вращения вокруг оси x |
рад/с |
|
|
7 |
Полная осевая упругая реакция связи |
Н |
|
|
8 |
Упругий момент реакции связи вокруг оси z. |
Н×м |
|
|
9 |
Упругий момент реакции связи вокруг оси x. |
Н×м |
|
|
10 |
Упругий момент реакции связи вокруг оси y. |
Н×м |
|
|
11 |
Диссипативный крутящий момент вокруг оси z. |
Н×м |
|
|
12 |
Диссипативный крутящий момент вокруг оси x. |
Н×м |
|
|
13, 14, 15 |
Угловые скорости вокруг осей ГСК для 1-го тела |
рад/с |
|
|
16, 17, 18 |
Угловые скорости вокруг осей ГСК для 2-го тела |
рад/с |
|
4.4.1.6. Цилиндрическое соединение двух тел CYLDR
Отображаемые свойства
Модель предназначена для воспроизведения свойств соединения двух абсолютно жестких тел перемещающихся в пространстве в том случае, когда разрешено относительное перемещение и вращение относительно некоторой пространственной оси. Физически такое соединение эквивалентно цилиндрическим направляющим. В точке соединения тел воспроизводятся упругие и вязкие характеристики связи при перемещении вдоль и вращении вокруг оси связи.
Два абсолютно жестких тела, пространственное движение которых определяется перемещениями (поступательными и угловыми) соответственно точек B1 и B2, соединены связью, разрешающей перемещение вдоль и вращение вокруг пространственной оси z (в дальнейшем ось связи). Запрещено относительное вращение тел вокруг остальных осей. Текущее положение оси z полностью определяется текущим угловым положением обоих тел. Начальное положение оси z связи определяется заданием точки D. Начальное положение осей x,y на вычисления не влияет и задается по умолчанию.
Ось материнского тела (втулки) связана с точкой A1, ось детского (стержня) тела – с точкой A2, принадлежащими первому и второму телу соответственно. В начальный момент времени точки A1 и A2 совпадают. В общем случае точки B1 и B2 могут совпадать с точкой A. Точки B1 и B2 могут не быть центрами масс тел.
Начало координат связи расположено в точке A. Пространственное положение точки А совпадает с геометрическим центром втулки – точкой А1. Таким образом, начало координат связи жестко связано с телом 1.
Взаимодействие между телами в точке связи определяется следующими характеристиками связи:
· Жесткостью связи при относительном смещении тел вдоль оси связи. Жесткость связи задается таблицей зависимости упругой силы вдоль оси связи от перемещения 1 тела относительного 2-го в направлении оси связи.
· Вязкостью связи при относительном смещении тел вдоль оси. Вязкость связи задается таблицей зависимости диссипативной силы вдоль оси связи от скорости перемещения 1-го тела относительно 2-го в направлении оси связи.
· Жесткостью связи при относительном повороте тел вокруг оси связи (крутильной жесткостью связи). Жесткость связи задается таблицей зависимости упругого крутящего момента вокруг оси связи от угла поворота 1 тела относительного 2-го вокруг оси связи.
· Вязкостью связи при относительном вращении вокруг оси связи (крутильная вязкость). Вязкость связи задается таблицей зависимости диссипативного крутящего момента вокруг оси связи от угловой скорости вращения 1-го тела относительно 2-го вокруг оси связи.
Исключение (минимизация) относительных перемещений вдоль других осей и вращений в плоскости, перпендикулярных оси связи осуществлено путем задания:
· большой жесткости в радиальном направлении (в плоскости, проходящей через ось вращения)
· большой изгибной жесткости (в плоскости, проходящей через ось вращения).
Степени свободы
|
1, 2, 3 |
Поступательные точки B1 в направлении глобальных координатных осей X,Y,Z. |
|
4, 5, 6 |
Вращательные точки B1 относительно глобальных координатных осей X,Y,Z |
|
7, 8, 9 |
Поступательные точки B2 в направлении глобальных координатных осей X,Y,Z. |
|
10, 11, 12 |
Вращательные точки B2 относительно глобальных координатных осей X,Y,Z |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки B1 |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки B2 |
м |
- Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки A |
м |
- Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки D |
м |
- Rlmax... +RLmax При совпадении с координатами точки A начальное положение оси связи совпадает с направлением оси Z глобальной системы координат |
|
13 |
Жесткость связи в радиальном направлении (в плоскости, проходящей через ось связи) |
H/м |
> 0 Рекомендуется 108 – 1010. |
|
14 |
Угловая (изгибная) жесткость связи вокруг оси, перпендикулярной плоскости, проходящей через ось связи |
H·м/рад |
> 0 Рекомендуется 105 – 107. |
|
15 |
Маркер (численная величина, отделяющая одну таблицу значений от другой) |
|
- Rlmax... +RLmax |
|
16… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругой силы от перемещения 1-го тела относительно 2-го вдоль оси связи. В каждой паре чисел: первое число - смещение 1-го тела относительно 2-го вдольоси связи [м] второе число - крутящий момент [Н] |
м, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение смещения должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении смещения аппроксимация должна обеспечивать нулевое значение силы. |
|
… |
Маркер |
|
Равно значению параметра 16 |
|
… |
Таблица 2 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкой силы от скорости 1-го тела относительно 2-го вдоль оси связи. В каждой паре чисел: первое число – угловая скорость 1-го тела относительно 2-го вокруг оси связи [радианы в секунду] второе число - крутящий момент [Н*м] |
м/с, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении скорости аппроксимация должна обеспечивать нулевое значение силы. |
|
… |
Маркер |
|
Равно значению параметра 16 |
|
… |
Таблица 3 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругого крутящего момента от угла поворота 1-го тела относительно 2-го вокруг оси относительного вращения. В каждой паре чисел: первое число - угол поворота 1-го тела относительно 2-го вокруг оси связи [радианы] второе число - крутящий момент [Н*м] |
рад, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угла поворота должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угла аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 16 |
|
… |
Таблица 4 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкого крутящего момента от угловой скорости 1-го тела относительно 2-го вокруг оси относительного вращения. В каждой паре чисел: первое число – угловая скорость 1-го тела относительно 2-го вокруг оси связи [радианы в секунду] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угловой скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угловой скорости аппроксимация должна обеспечивать нулевое значение момента. |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Осевая деформация связи |
м |
|
|
2 |
Радиальная деформация связи |
м |
|
|
3 |
Угловая деформация связи в плоскости, проходящей через ось |
рад |
|
|
4 |
Угловая деформация связи вокруг оси связи |
рад |
|
|
5 |
Скорость относительного перемещения вдоль оси |
м/с |
|
|
6 |
Угловая скорость относительного вращения вокруг оси |
рад/с |
|
|
7 |
Осевая реакция связи |
Н |
|
|
8 |
Радиальная реакция связи |
Н |
|
|
9 |
Упругий момент реакции связи в плоскости, проходящей через ось. |
Н×м |
|
|
10 |
Упругий момент реакции связи вокруг оси связи. |
Н×м |
|
|
11 |
Диссипативная сила вдоль оси связи |
Н |
|
|
12 |
Диссипативный крутящий момент вокруг оси связи |
Н×м |
|
|
13, 14, 15 |
Угловые скорости вокруг осей ГСК для 1-го тела |
рад/с |
|
|
16, 17, 18 |
Угловые скорости вокруг осей ГСК для 2-го тела |
рад/с |
|
4.4.1.7. Поворотное соединение двух тел ROT1
Отображаемые свойства
Модель предназначена для воспроизведения свойств соединения двух абсолютно жестких тел перемещающихся в пространстве в том случае, когда разрешено их относительное вращение вокруг одной, в общем случае подвижной, координатной оси. Физически такое соединение эквивалентно цилиндрическому подшипнику с ограничением осевых перемещений. В точке соединения тел воспроизводятся упругие и вязкие характеристики связи при вращении вокруг оси соединения.
Два абсолютно жестких тела, пространственное движение которых определяется перемещениями (поступательными и угловыми) соответственно точек B1 и B2, соединены связью, запрещающей вращение вокруг двух взаимно перпендикулярных осей x,y и перемещение вдоль третьей оси z (при необходимости, перемещение вдоль оси z может быть разрешено). Текущее положение оси z полностью определяется текущим угловым положением обоих тел. Начальное положение оси z связи определяется заданием точки D. Начальное положение осей x,y на вычисления не влияет и задается по умолчанию.
Центр связи расположен в точке A. В общем случае точки B1 и B2 могут совпадать с точкой A. Точки B1 и B2 могут не быть центрами масс тел.
Взаимодействие между телами в точке связи определяется следующими характеристиками связи:
· Жесткостью связи при относительном повороте тел вокруг оси связи (крутильной жесткостью связи). Жесткость связи задается таблицей зависимости упругого крутящего момента вокруг оси связи от угла поворота 1 тела относительного 2-го вокруг оси связи.
· Вязкостью связи при относительном вращении вокруг оси связи (крутильная вязкость). Вязкость связи задается таблицей зависимости диссипативного крутящего момента вокруг оси связи от угловой скорости вращения 1-го тела относительно 2-го вокруг оси связи.
Исключение (минимизация) относительных перемещений вдоль любых осей и вращений в плоскости, перпендикулярных оси связи осуществлено путем задания:
· большой жесткости в радиальном направлении (в плоскости, проходящей через ось вращения)
· большой жесткости в осевом направлении (вдоль оси связи).
· большой изгибной жесткости (в плоскости, проходящей через ось вращения).
В случае задания осевой жесткости равной нулю модель воспроизводит цилиндрический подшипник без ограничения осевых смещений двух тел друг относительно друга.
Степени свободы
|
1, 2, 3 |
Поступательные точки B1 в направлении глобальных координатных осей X,Y,Z. |
|
4, 5, 6 |
Вращательные точки B1 относительно глобальных координатных осей X,Y,Z |
|
7, 8, 9 |
Поступательные точки B2 в направлении глобальных координатных осей X,Y,Z. |
|
10, 11, 12 |
Вращательные точки B2 относительно глобальных координатных осей X,Y,Z |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки B1 |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки B2 |
м |
- Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки A |
м |
- Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки D |
м |
- Rlmax... +RLmax При совпадении с координатами точки A начальное положение оси связи совпадает с направлением оси Z глобальной системы координат |
|
13 |
Жесткость связи в радиальном направлении (в плоскости, проходящей через ось связи) |
H/м |
> 0 Рекомендуется 108 – 1010. |
|
14 |
Угловая (изгибная) жесткость связи вокруг оси, перпендикулярной плоскости, проходящей через ось связи |
H·м/рад |
> 0 Рекомендуется 105 – 107. |
|
15 |
Жесткость связи в осевом направлении (вдоль оси связи) |
H/м |
³ 0 Рекомендуется 108 – 1010. При задании нулевой жесткости реализуется пространственный цилиндрический подшипник без ограничения осевых перемещений |
|
16 |
Маркер (численная величина, отделяющая одну таблицу значений от другой) |
|
- Rlmax... +RLmax |
|
17… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругого крутящего момента от угла поворота 1-го тела относительно 2-го вокруг оси относительного вращения. В каждой паре чисел: первое число - угол поворота 1-го тела относительно 2-го вокруг оси связи [радианы] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угла поворота должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угла аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 16 |
|
… |
Таблица 2 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкого крутящего момента от угловой скорости 1-го тела относительно 2-го вокруг оси относительного вращения. В каждой паре чисел: первое число – угловая скорость 1-го тела относительно 2-го вокруг оси связи [радианы в секунду] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угловой скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угловой скорости аппроксимация должна обеспечивать нулевое значение момента. |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Осевая деформация связи |
м |
|
|
2 |
Радиальная деформация связи |
м |
|
|
3 |
Угловая деформация связи в плоскости, проходящей через ось |
рад |
|
|
4 |
Угловая деформация связи вокруг оси связи |
рад |
|
|
5 |
Угловая скорость относительного вращения вокруг оси |
рад/с |
|
|
6 |
Осевая реакция связи |
Н |
|
|
7 |
Радиальная реакция связи |
Н |
|
|
8 |
Упругий момент реакции связи в плоскости, проходящей через ось. |
Н×м |
|
|
9 |
Упругий момент реакции связи вокруг оси связи. |
Н×м |
|
|
10 |
Диссипативный крутящий момент вокруг оси связи |
Н×м |
|
|
11, 12, 13 |
Угловые скорости вокруг осей ГСК для 1-го тела |
рад/с |
|
|
14, 15, 16 |
Угловые скорости вокруг осей ГСК для 2-го тела |
рад/с |
|
4.4.1.8. Сферический шарнир ROT3
Отображаемые свойства
Модель предназначена для воспроизведения свойств соединения двух абсолютно жестких тел перемещающихся в пространстве в том случае, когда разрешено относительное вращение второго тела вокруг трех взаимно перпендикулярных осей, жестко связанных с первым. Физически такое соединение эквивалентно сферическому шарниру. В точке соединения тел воспроизводятся упругие и вязкие характеристики связи при вращении вокруг осей разрешенного поворота.
Два абсолютно жестких тела, пространственное движение которых определяется перемещениями (поступательными и угловыми) соответственно точек B1 и B2, соединены в точке A связью, разрешающей относительное вращение 2-го тела вокруг трех взаимно перпендикулярных осей x1,y1,z1, определяющих пространственное положение 1-го тела. Относительные перемещения тел в точке связи A запрещены. Текущее положение осей системы координат Axyz полностью определяются угловым положением тела 1 и параллельно системе координат B1x1y,z1. Начальное положение оси z определяется заданием точек A и D. Точка С совместно с точками А, D определяет начальное положение плоскости Axz.
В общем случае точки B1 и B2 могут совпадать с точкой A. Точки B1 и B2 могут не быть центрами масс тел.
Взаимодействие между телами в точке связи определяется следующими характеристиками связи:
· Жесткостями связи при относительном повороте тел вокруг осей x1,y1,z1 1-го тела (крутильной жесткостью связи). Жесткость связи задается таблицей зависимости упругого крутящего момента вокруг оси от угла поворота 1 тела относительного 2-го вокруг этой оси.
· Вязкостями связи при относительном вращении вокруг осей x1,y1,z1 (крутильная вязкость). Вязкость связи задается таблицей зависимости диссипативного крутящего момента вокруг оси от угловой скорости вращения 1-го тела относительно 2-го вокруг этой оси.
Исключение (минимизация) относительных перемещений вдоль всех осей и вращения вокруг оставшейся оси (оси y) осуществлено путем задания большой жесткости в осевых направлениях (все жесткости считаем равными между собой) – K=Kx=Ky=Kz.
Степени свободы
|
1, 2, 3 |
Поступательные точки B1 в направлении глобальных координатных осей X,Y,Z. |
|
4, 5, 6 |
Вращательные точки B1 относительно глобальных координатных осей X,Y,Z |
|
7, 8, 9 |
Поступательные точки B2 в направлении глобальных координатных осей X,Y,Z. |
|
10, 11, 12 |
Вращательные точки B2 относительно глобальных координатных осей X,Y,Z |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки B1 |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки B2 |
м |
- Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки A |
м |
- Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки D |
м |
- Rlmax... +RLmax При совпадении с координатами точки A начальное положение оси связи совпадает с направлением оси Z глобальной системы координат |
|
13,14,15 |
начальные координаты точки С |
м |
- Rlmax... +RLmax Если лежит на оси AD, то начальное положение осей x,y определяется по умолчанию: поворотом глобальной системы координат вокруг оси, перпендикулярной плоскости расположения осей Z,z до их совмещения. |
|
16 |
Жесткость связи в направлении любой оси, проходящей через точку A (оси запрещенных перемещений) |
H/м |
> 0 Рекомендуется 108 – 1010. |
|
17 |
Маркер (численная величина, отделяющая одну таблицу значений от другой) |
|
- Rlmax... +RLmax |
|
18 |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругого крутящего момента от угла поворота 1-го тела относительно 2-го вокруг оси x. В каждой паре чисел: первое число - угол поворота 1-го тела относительно 2-го вокруг оси связи [радианы] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угла поворота должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угла аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 18 |
|
… |
Таблица 2 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкого крутящего момента от угловой скорости 1-го тела относительно 2-го вокруг оси x . В каждой паре чисел: первое число – угловая скорость 1-го тела относительно 2-го вокруг оси связи [радианы в секунду] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угловой скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угловой скорости аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 18 |
|
… |
Таблица 3 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругого крутящего момента от угла поворота 1-го тела относительно 2-го вокруг оси y. В каждой паре чисел: первое число - угол поворота 1-го тела относительно 2-го вокруг оси связи [радианы] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угла поворота должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угла аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 18 |
|
… |
Таблица 4 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкого крутящего момента от угловой скорости 1-го тела относительно 2-го вокруг оси y . В каждой паре чисел: первое число – угловая скорость 1-го тела относительно 2-го вокруг оси связи [радианы в секунду] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угловой скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угловой скорости аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 18 |
|
… |
Таблица 5 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругого крутящего момента от угла поворота 1-го тела относительно 2-го вокруг оси z. В каждой паре чисел: первое число - угол поворота 1-го тела относительно 2-го вокруг оси связи [радианы] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угла поворота должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угла аппроксимация должна обеспечивать нулевое значение момента. |
|
… |
Маркер |
|
Равно значению параметра 18 |
|
… |
Таблица 6 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкого крутящего момента от угловой скорости 1-го тела относительно 2-го вокруг оси z . В каждой паре чисел: первое число – угловая скорость 1-го тела относительно 2-го вокруг оси связи [радианы в секунду] второе число - крутящий момент [Н*м] |
рад/с, H·м |
Таблица должна содержать не менее 4-х значений (2 пары). Значение угловой скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угловой скорости аппроксимация должна обеспечивать нулевое значение момента. |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Полная осевая деформация связи |
м |
|
|
2 |
Угловая деформация связи вокруг оси x |
рад |
|
|
3 |
Угловая деформация связи вокруг оси y |
рад |
|
|
4 |
Угловая деформация связи вокруг оси z |
рад |
|
|
5 |
Угловая скорость относительного вращения вокруг оси x |
рад/с |
|
|
6 |
Угловая скорость относительного вращения вокруг оси y |
рад/с |
|
|
7 |
Угловая скорость относительного вращения вокруг оси z |
рад/с |
|
|
8 |
Полная осевая упругая реакция связи |
Н |
|
|
9 |
Упругий момент реакции связи вокруг оси x. |
Н×м |
|
|
10 |
Упругий момент реакции связи вокруг оси y. |
Н×м |
|
|
11 |
Упругий момент реакции связи вокруг оси z. |
Н×м |
|
|
12 |
Диссипативный крутящий момент вокруг оси x. |
Н×м |
|
|
13 |
Диссипативный крутящий момент вокруг оси y. |
Н×м |
|
|
14 |
Диссипативный крутящий момент вокруг оси z. |
Н×м |
|
|
15, 16, 17 |
Угловые скорости вокруг осей ГСК для 1-го тела |
рад/с |
|
|
18, 19, 20 |
Угловые скорости вокруг осей ГСК для 2-го тела |
рад/с |
|
4.4.1.9. Переносное соединение двух тел TRANS
Отображаемые свойства
Модель предназначена для воспроизведения свойств соединения двух абсолютно жестких тел перемещающихся в пространстве в том случае, когда разрешено их относительное перемещение в направлении одной, в общем случае подвижной, координатной оси. Физически такое соединение эквивалентно подвижным направляющим скольжения. В точке соединения тел воспроизводятся упругие и вязкие характеристики связи при перемещении вдоль оси соединения.
Два абсолютно жестких тела, пространственное движение которых определяется перемещениями (поступательными и угловыми) соответственно точек B1 и B2, соединены связью, запрещающей относительное вращение тел вокруг любых трех взаимно перпендикулярных осей локальной системы координат (ЛСКс на рисунке) и перемещение вдоль осей x,y этой системы координат. Разрешено только относительное перемещение вдоль оси z локальной системы координат. Текущее положение оси z полностью определяется текущим угловым положением обоих тел. Начальное положение оси z связи определяется заданием точки D. Начальное положение осей x,y на вычисления не влияет и задается по умолчанию.
Центр связи расположен в точке A. В общем случае точки B1 и B2 могут совпадать с точкой A. Точки B1 и B2 могут не быть центрами масс тел.
Взаимодействие между телами в точке связи определяется следующими характеристиками связи:
· Жесткостью связи при относительном перемещении тел вдоль оси связи. Жесткость связи задается таблицей зависимости упругой силы в направлении оси связи от перемещения 1 тела относительного 2-го вдоль оси связи.
· Вязкостью связи при относительном перемещении вдоль оси связи. Вязкость связи задается таблицей зависимости диссипативной силы в направлении оси связи от скорости перемещения 1-го тела относительно 2-го вдоль оси связи.
Исключение (минимизация) относительных вращений вдоль любых осей и перемещений в плоскости, проходящих через ось связи осуществлено путем задания:
· большой жесткости в радиальном направлении (в плоскости, проходящей через ось связи)
· большой изгибной жесткости (в плоскости, проходящей через ось связи).
· большой крутильной жесткости (вокруг оси связи).
Степени свободы
|
1, 2, 3 |
Поступательные точки B1 в направлении глобальных координатных осей X,Y,Z. |
|
4, 5, 6 |
Вращательные точки B1 относительно глобальных координатных осей X,Y,Z |
|
7, 8, 9 |
Поступательные точки B2 в направлении глобальных координатных осей X,Y,Z. |
|
10, 11, 12 |
Вращательные точки B2 относительно глобальных координатных осей X,Y,Z |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки B1 |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки B2 |
м |
- Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки A |
м |
- Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки D |
м |
- Rlmax... +RLmax При совпадении с координатами точки A начальное положение оси связи совпадает с направлением оси Z глобальной системы координат |
|
13 |
Жесткость связи в радиальном направлении (в плоскости, проходящей через ось связи) |
H/м |
> 0 Рекомендуется 108 – 1010. |
|
14 |
Угловая (изгибная) жесткость связи вокруг оси, перпендикулярной плоскости, проходящей через ось связи |
H·м/рад |
> 0 Рекомендуется 105 – 107. |
|
15 |
Угловая (крутильная) жесткость связи вокруг оси связи |
H·м/рад |
> 0 Рекомендуется 105 – 107. |
|
16 |
Маркер (численная величина, отделяющая одну таблицу значений от другой) |
|
- Rlmax... +RLmax |
|
17… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости упругой силы от перемещения 1-го тела относительно 2-го вдоль оси относительного перемещения. В каждой паре чисел: первое число - перемещение 1-го тела относительно 2-го вдоль оси связи [метры] второе число - сила [Ньютоны] |
м, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение перемещения должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угла аппроксимация должна обеспечивать нулевое значение силы. |
|
… |
Маркер |
|
Равно значению параметра 16 |
|
… |
Таблица 2 - пары чисел, определяющие кусочно-линейную аппроксимацию зависимости вязкой силы от скорости 1-го тела относительно 2-го вдоль оси относительного перемещения. В каждой паре чисел: первое число – скорость 1-го тела относительно 2-го вдоль оси связи [метры в секунду] второе число - крутящий момент [Ньютоны] |
м/с, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение скорости должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении угловой скорости аппроксимация должна обеспечивать нулевое значение силы. |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Осевая деформация связи |
м |
|
|
2 |
Радиальная деформация связи |
м |
|
|
3 |
Угловая деформация связи в плоскости, проходящей через ось |
рад |
|
|
4 |
Угловая деформация связи вокруг оси связи |
рад |
|
|
5 |
Скорость относительного перемещения вдоль оси связи |
м/с |
|
|
6 |
Осевая реакция связи |
Н |
|
|
7 |
Радиальная реакция связи |
Н |
|
|
8 |
Упругий момент реакции связи в плоскости, проходящей через ось. |
Н×м |
|
|
9 |
Упругий момент реакции связи вокруг оси связи. |
Н×м |
|
|
10 |
Диссипативная сила вдоль оси связи |
Н |
|
|
11, 12, 13 |
Угловые скорости вокруг осей ГСК для 1-го тела |
рад/с |
|
|
14, 15, 16 |
Угловые скорости вокруг осей ГСК для 2-го тела |
рад/с |
|
4.4.2. Диссипативные связи
4.4.2.1. Вязкостная связь между двумя телами с зависимостью усилия от скорости деформации элемента, задаваемой таблично SV3MUT
Отображаемые свойства
Задает зависимость усилия, действующего между двумя телами, от скорости деформации элемента. Скорость деформации определяется как проекция относительной скорости связываемых точек на линию, их соединяющую. Усилие, генерируемое элементом, действует вдоль этой же линии. Характеристика связи задается в виде таблицы значений "скорость деформации - усилие" (см. рис. SV3MUT_1).
Правила, которые нужно соблюдать при задании таблицы:
1. Точки зависимости усилия от скорости должны быть упорядочены по возрастанию скорости (dVi =< dVi+1, отрицательные значения скоростей соответствуют сжатию элемента, положительные - растяжению). Для двух первых и двух последних точек должно выполняться условие dVi < dVi+1 ;
2. Должно быть задано как минимум две точки зависимости усилия от скорости. Это требование вызвано тем, что в случае, если реальная скорость деформации элемента лежит вне заданного диапазона dV1 ... dVn , то текущее усилие определяется путем экстраполяции крайних отрезков характеристики.
Примечание. Начальная длина элемента, определяемая заданными начальными координатами его концов, должна быть больше нуля.
|
|
|
SV3MUT_1. |
Пространственная связь, реализующая табличную зависимость усилия от скорости деформации. Принятые обозначения: F – усилие, действующее на связь со стороны соединяемых тел; ΔVε – скорость деформации элемента. а) степени свободы элемента и параметры, определяющие начальное расположение элемента в пространстве: 1, 2, 3 – перемещение первого тела по осям X, Y, Z; 4, 5, 6 - перемещение второго тела по осям X, Y, Z; Xa, Ya, Za – начальные координаты точки A; Xb, Yb, Zb – начальные координаты точки B. б) Схема определения текущей скорости деформации элемента и направления действующих усилий в зависимости от положения элемента в пространстве; в) Табличная зависимость усилия от скорости деформации. Каждая точка таблицы задается парой значений «скорость деформации–усилие» За пределами интервала скоростей ΔVε1- ΔVεn усилие связи определяется экстраполяцией крайних отрезков характеристики. |
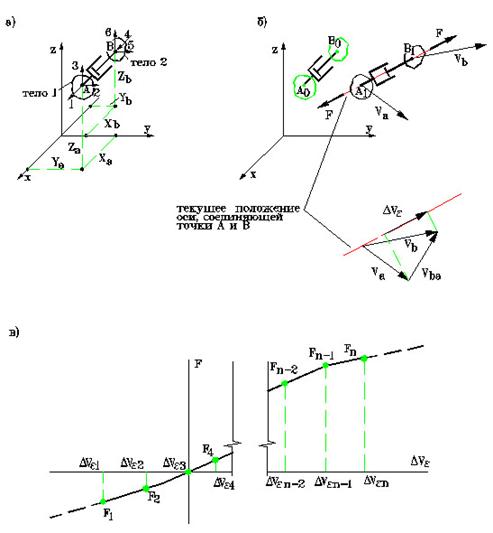
Степени свободы
|
1,2,3 - |
поступательные по осям X, Y и Z точки A, принадлежащей первому телу; |
|
4,5,6 - |
поступательные по осям X, Y и Z точки B, принадлежащей второму телу. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки A (Xa,Ya,Za) |
м |
-RLmax ... +RLmax |
|
4,5,6 |
Начальные координаты точки B (Xb,Yb,Zb) |
м |
-RLmax ... +RLmax |
|
7 |
dV1 - скорость деформации для первой заданной точки характеристики |
м/сек |
-RLmax ... +RLmax |
|
8 |
F1 - усилие, соответствующее скорости деформации dV1 |
Н |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*i+5 |
dVi - скорость деформации для i-й заданной точки характеристики |
м/сек |
dVi -1 ... +RLmax |
|
2*i+6 |
Fi - усилие, соответствующее скорости деформации dVi |
Н |
-RLmax ... +RLmax |
|
|
. . . . . |
|
|
|
2*n+5 |
dVn - скорость деформации для n-й заданной точки характеристики |
м/сек |
dVn -1 ... +RLmax |
|
2*n+6 |
Fn - усилие, соответствующее скорости деформации dVn |
Н |
-RLmax ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
величина скорости деформации элемента |
м |
|
|
2 |
осевая сила в элементе |
Н |
|
Пример использования
См. пример из раздела 4.4.1.1.
4.5. Специальные связи
4.5.1.1. Упругая связь, позволяющая передать вращение между одномерным (или плоским) и пространственным элементами вокруг заданной пространственной оси SV13W
Отображаемые свойства
Реализует упругую связь по вращению между двумя точками M и N, первая из которых принадлежит одномерному (или плоскому) элементу и имеет одну вращательную степень свободы вокруг задаваемой оси AB, вторая - принадлежит пространственному элементу и имеет три вращательных степени свободы вокруг координатных осей X,Y,Z. Ось AB может изменять свое угловое положение. Угловое перемещение оси AB определяется угловым перемещением точки N, с которой связаны пространственные угловые степени свободы элемента.
Примечание. Положение пространственной оси, вокруг которой передается вращение, задается двумя точками, обозначенными здесь точками A и B (рис. SV13W_1). За положительное направление вращения принято направление от точки A к точке B. Точка, принадлежащая одномерному (или плоскому) элементу и имеющая одну вращательную степень свободы, обозначена точкой M. Точка, принадлежащая пространственному элементу и имеющая три вращательных степени свободы вокруг координатных осей, обозначена точкой N.
Степени свободы
|
1 - |
вращательная точки M вокруг оси AB; |
|
2, 3, 4 - |
вращательные точки N вокруг координатных осей X,Y,Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки A (XA ,YA ,ZA) |
м |
-RLmax ... +RLmax |
|
4,5,6 |
Начальные координаты точки B (XB,YB,ZB) |
м |
-RLmax ... +RLmax |
|
7 |
жесткость связи на скручивание (*) |
Н*м/рад |
0 ... +RLmax |
*) При сильно завышенных значениях жесткости на скручивание (> 1.e7) могут проявляться вычислительные сложности, связанные с ограниченностью разрядной сетки компьютера. Рекомендуется назначать обоснованные значения жесткости на кручение, исходя из фактических геометрических размеров и модуля упругости связывающей детали.
|
|
|
SV13W_1. |
Упругая связь по вращению между точкой с одномерной угловой степенью свободы (точка М) и точкой с пространственными угловыми степенями свободы (точка N). Степени свободы элемента: 1 – вращательная точки М вокруг оси AB; 2, 3, 4 – вращательные точки N вокруг координатных осей X, Y, Z. Параметры: Xa, Ya, Za – начальные координаты точки A; Xb, Yb, Zb – начальные координаты точки B. |
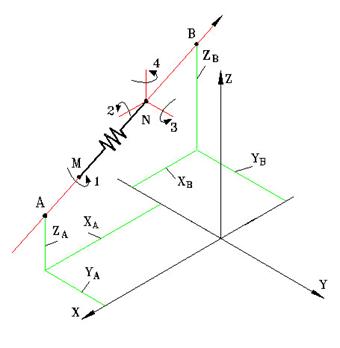
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
угол скручивания (разность между поворотами вокруг оси AB точки N и точки M) |
рад |
|
Особые ситуации
Перечень ситуаций, при которых текущий шаг интегрирования считается потерянным и происходит возврат к началу шага с уменьшением величины шага:
1. За текущий шаг изменение углового положения оси вращения близко к 180 градусам.
2. За текущий шаг приращение угла поворота точки N вокруг оси вращения превысило 135 градусов.
3. На текущем шаге получено критическое значение нормирующего множителя, связанного с угловыми степенями свободы точки N.
При исчерпании возможности деления шага (если текущий шаг - минимальный), рабочая программа останавливается с выдачей соответствующего диагностического сообщения.
Пример использования
1. На рис. SV13W_2 приведен пример конструкции, состоящей из участка вала AO, расположенного вдоль оси X, рычага OC, жестко соединенного с валом, и цилиндрического шарнира, ось которого также совпадает с осью X. К концу вала прикладывается воздействие, определяющее требуемую зависимость угловой скорости вращения от времени. В данном случае вращательное движение необходимо передать с одномерного элемента, задающего требуемую характеристику угловой скорости вращения вала (элемент VTR0) на пространственную балку (элемент BAL3DJ), моделирующую движение рычага OC. Элемент SV13W отражает в этом примере упругие свойства вала AO на кручение. Жесткость связи определяется параметрами участка вала: длина - 120 мм, диаметр - 20 мм (полярный момент инерции сечения Jp = 1.57e-8), материал - сталь (модуль упругости при сдвиге G=0.79e11 Па).
|
|
|
SV13W_2. |
Пример передачи вращательного движения с одномерного на пространственный элемент для случая, когда ось вращения почти не изменяет своего углового положения. |
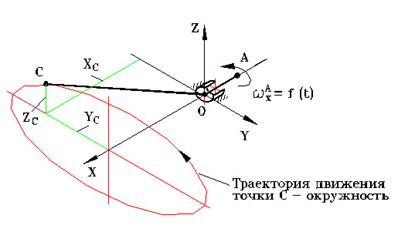
Крутильная жесткость вала:
G*Jr / L = 0.79e11 * 1.57e-8 / 0.12 = 1.03e4 [ H*м/рад]
Инерционность при вращении (момент инерции относительно продольной оси вала):
m*R2/ 2 = 0.29*0.012 / 2 = 1.45e-5 [кг*м2]
, где m = 0.29 кг - масса участка вала.
Геометрические характеристики поперечного сечения рычага OC определяются диаметром сечения, равным 20 мм.
Текст задания на языке PradiSLang:
$ DATA:
Точка A = -100.e-3, 0, 0
Точка O = 0, 0, 0
Точка C = 400.e-3, -200.e-3, 70.e-3
J = 0.79 e-8
Jk = 1.57 e-8
S = 3.14 e-4
E = 2.e11
PO = 0.3
RO = 7800
Параметры рычага = J, J, Jk, S, E, PO, RO
Крутильная жесткость вала = 1.03 E4
Момент инерции вала = 1.45 E-5
Изгибная жесткость шарнира = 1.E4
Скоростное воздействие = 0, 5, 0, 2, 10, 10, 1.E8
Вид со стороны оси X = 1.2, 0, 0, 0.20,
1, 0, 0.20, 0, 1, 0.20, 0
Вид со стороны оси Z = 1.2, 0.20, 0, 0,
0.20, 0, 1, 0.20, 1, 0, 0
$ FRAGMENT:
# BASE: 5,6,7, 100
# STRUCT:
Вал AO 'SV13W (1, 2,3,4; Точка A, Точка O,
Крутильная жесткость вала)
'M (1; Момент инерции вала)
Рычаг OC 'BAL3DJ (5,6,7, 2,3,4, 8,9,10, 11,12,13;
Точка O, Точка C, Точка C,
Параметры рычага )
Цилиндрический шарнир 'SH3C (2,3,4, 100,100,100;
Точка A, Точка O,
Изгибная жесткость шарнира)
Воздействие 'VTR0 (1 100; Скоростное воздействие)
# OUT:
Угловая скорость точки A 'V(1;1)
Угол поворота точки A 'S(1;1)
Угол скручивания между А и O 'X(W:Вал AO(1);1)
Крутящий момент на валу AO 'X(F:Вал AO(1);1)
Координаты точки C 'KOORD3 (8,9,10; Точка C)
$ SHOW:
Вид со стороны оси X 'LAYER (;Вид со стороны оси X)
Вид со стороны оси Z 'LAYER (;Вид со стороны оси Z)
$ RUN:
Передача вращательного движения 'SHTERM (END = 5)
$ PRINT:
Траектория движения точки C 'DISP(FROM=1;
Координаты точки C (3),
Координаты точки C (2) )
Прочие результаты 'DISP(;
Угловая скорость точки A,
Угол поворота точки A,
Угол скручивания между А и O,
Крутящий момент на валу AO )
$ END
2. Случай передачи вращения с изменением углового положения оси вращения. Рассматривается перемещение манипулятора (рис. SV13W_3), состоящее из трех совместно протекающих движений: вертикальное перемещение вниз, поворот корпуса манипулятора в горизонтальной плоскости, поворот схвата относительно продольной оси корпуса.
|
|
|
SV13W_3. |
Пример передачи вращательного движения с одномерных на пространственные элементы с изменением углового положения оси вращения при моделировании движений манипулятора. |
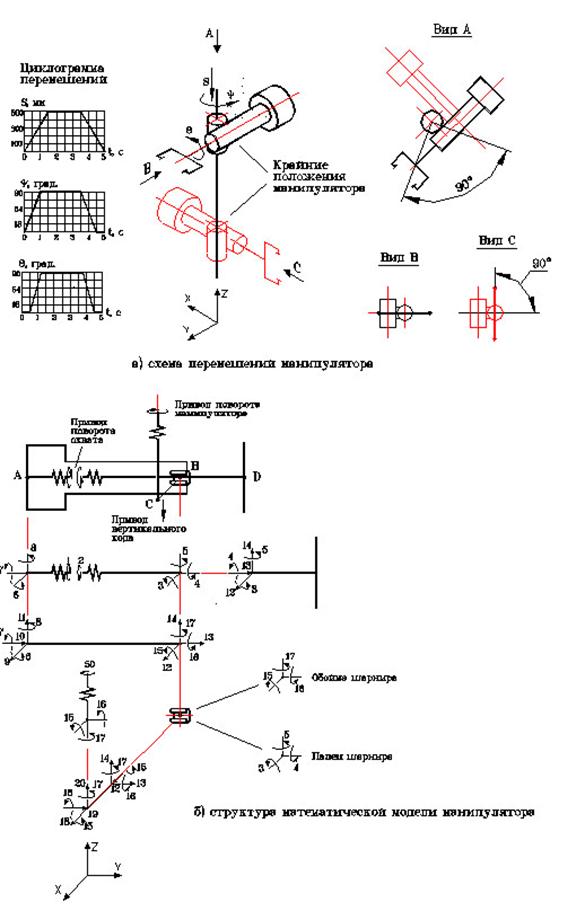
В этой модели необходимо передать вращение от двух одномерных приводов: привода поворота корпуса и привода поворота схвата (приводы моделируются элементами STR0, воспроизводящими требуемый закон перемещений). Поворот корпуса происходит относительно неподвижной вертикальной оси. Поворот схвата - относительно продольной оси корпуса, изменяющей свое положение. Особенностью построения расчетной схемы для передачи вращения от привода поворота схвата является использование двух элементов SV13W: один, как обычно, передает вращение от вала двигателя к схвату, а второй - связывает корпус двигателя и корпус манипулятора. Необходимость второго элемента объясняется тем, что текущее положение оси вала двигателя должно быть согласовано с текущим положением оси корпуса двигателя. Поэтому закрепление по угловой степени свободы корпуса двигателя было бы ошибочным.
В процессе расчета на экран выводится условное изображение манипулятора в трех проекциях на неподвижную систему координат и изображение поворачивающегося схвата в подвижной системе координат, связанной с перемещающимся корпусом.
Текст модели на языке PradiSLang:
$ DATA:
Точка O = 0, 0, 0
Точка A =-125.e-3, -416.e-3, 920.e-3
Точка B =-125.e-3, 0.e-3, 920.e-3
Точка C = 0, 0, 920.e-3
Точка D =-125.e-3, 260.e-3, 920.e-3
Точка E =-235.e-3, 260.e-3, 920.e-3
Точка F = -15.e-3, 260.e-3, 920.e-3
k1 = 8.4e3
k2 = 4.6e4
k3 = 6.2e4
Изгибная жесткость шарнира = 1.e4
J1 = 8.7e-3; J2 = 1.8e-2; J3 = 0.17
Характеристика вертик. пермещения =
0, -0.50, 0, 1.5, 2, 1.5, 1.e6
Характер. поворота корпуса =
0, 1.5708, 0, 1., 2.5, 1., 1.e6
Характеристика привода схвата =
0, 1.5708, 0.5, 0.7, 2.6, 0.7, 1.e5
Сталь = 2.e11, 0.3, 7800
Параметры корпуса = 2.e-7, 2.e-7, 4.e-7, 2.e-3, Сталь
Параметры схвата = 1.e-8, 1.e-8, 2.e-8, 3.e-4, Сталь
Параметры поперечины = 1.e-7, 1.e-7, 1.e-7, 1.e-3, Сталь
Параметры слоя 1 = 2, 0,-0.5, 0.2, 1,-0.5, 0.2, 0, 1,.2
Параметры слоя 2 = 2, -0.9, 0, 0.2, -0.9, 1, 0.2, -2, 0,.2
Параметры слоя 3 = 2, -0.9,-0.6, 0, -0.9,-0.6, 1, -2,-.6,0
Размер окна = 0.3
Цвет 1 = 14; Цвет 2 = 4; Цвет 3 = 1
$ FRAGMENT: Манипул
# BASE : 100, 15,16
# STRUCT:
Привод поворота схвата 'STR0 (1 2;
Характеристика привода схвата)
'M (1;J1); 'M (2;J2)
Передаточное звено к схвату 'SV13W (2 3 4 5;
Точка A, Точка B, k1 )
Передаточное звено к корпусу 'SV13W (1 6 7 8;
Точка A, Точка B, k2 )
Корпус манипулятора 'BAL3DJ ( 9 10 11 6 7 8
12 13 14 15 16 17;
Точка A, Точка B, Точка B,
Параметры корпуса )
Цилиндрический шарнир 'SH3C (15 16 17 3 4 5;
Точка A, Точка B,
Изгибная жесткость шарнира )
Схват_продольный участок 'BAL3DJ (12 13 14 3 4 5
24 25 26 27 28 29;
Точка B, Точка D, Точка D,
Параметры схвата )
Схват_поперечный участок 1 'BAL3DJ (24 25 26 27 28 29
30 31 32 33 34 35;
Точка D, Точка E, Точка E,
Параметры схвата )
Схват_поперечный участок 2 'BAL3DJ (24 25 26 27 28 29
36 37 38 39 40 41;
Точка D, Точка F, Точка F,
Параметры схвата )
Привод поворота манипулятора 'STR0 (50 100;
Характер. поворота корпуса)
Передаточное звено к поперечине 'SV13W (50 15 16 17;
Точка O, Точка C, k3 )
'M (50;J3)
Поперечина 'BAL3DJ (18 19 20 15 16 17
12 13 14 15 16 17;
Точка C, Точка B, Точка B,
Параметры поперечины )
Привод вертикал. перемещения 'STR0 (20 100;
Характеристика вертик. пермещения)
# OUT:
Угол поворота схвата 'DX(2, 1;1)
Угол поворота корпуса 'S (50;1)
Вертикальное перемещение 'S (20;1)
$ SHOW:
{ Вид на манипулятор относительно неподвижной системы координат }
{Со стороны оси Y}
Поперечина 'LAYER (Поперечина;
Параметры слоя 2, Цвет 1 )
Корпус 'LAYER (Корпус манипулятора;
Параметры слоя 2, Цвет 2 )
Схват 'LAYER (Схват_продольный участок,
Схват_поперечный участок 1,
Схват_поперечный участок 2;
Параметры слоя 2, Цвет 3 )
{Со стороны оси X}
Поперечина 'LAYER (Поперечина;
Параметры слоя 1, Цвет 1 )
Корпус 'LAYER (Корпус манипулятора;
Параметры слоя 1, Цвет 2 )
Схват 'LAYER (Схват_продольный участок,
Схват_поперечный участок 1,
Схват_поперечный участок 2;
Параметры слоя 1, Цвет 3 )
{Со стороны оси Z}
Поперечина 'LAYER (Поперечина;
Параметры слоя 3, Цвет 1 )
Корпус 'LAYER (Корпус манипулятора;
Параметры слоя 3, Цвет 2 )
Схват 'LAYER (Схват_продольный участок,
Схват_поперечный участок 1,
Схват_поперечный участок 2;
Параметры слоя 3, Цвет 3 )
{ Вид на схват в локал.сист.координат, движущейся вместе с корпусом }
Поперечина 'LAYER (Поперечина;
Размер окна,
Точка B, Точка D, Точка C, Цвет 1;
12 13 14 24 25 26 18 19 20)
Схват 'LAYER (Схват_поперечный участок 1,
Схват_поперечный участок 2;
Размер окна,
Точка B, Точка D, Точка C, Цвет 3;
12 13 14 24 25 26 18 19 20)
$ RUN:
Движение манипулятора 'SHTERM (END=5, ITR=7,
CONTROL=1.E-3, SMAX=0.05)
$ PRINT:
Циклограмма движений манипулятора 'DISP()
$ END
4.6. Нити
4.6.1.1. Упругая нить THREAD
Отображаемые свойства
|
|
|
|
Рис. THREAD_1. |
Рис. THREAD_2. |

Модель предназначена для воспроизведения свойств упругой нити с учетом гистерезиса, инерционных свойств материала нити и его силы тяжести. В крайних точках модель может контактировать с другими телами и связями. Модель не воспроизводит конфигурацию нити между крайними точками в ненатянутом состоянии.
Может быть использована для моделирования сегмента ремня безопасности автомобиля на участках между местами крепления ремня к кузову. Участки ремня могут быть разделены на любое количество сегментов, соединенных друг с другом. Для воспроизведения свойств соединения ремня безопасности с кольцом и катушкой, исследования перекручивания ремня следует использовать другие модели.
Две точки A1 и A2, способные перемещаться в пространстве под действием внешних сил, связаны между собой упругой нитью.
В начальный момент времени нить может находиться в ненатянутом состоянии, в этом случае начальные координаты точек A1 и A2 могут совпадать. Упругая сила возникает, если текущее расстояние LT между точками A1 и A2 превосходит длину нити в ненатянутом состоянии LN (см. рис. THREAD_1). Нить не воспринимает сжимающую нагрузку. Предварительное натяжение нити может быть воспроизведено заданием величины LN меньшей, чем LT0 (начальное расстояние между точками).
Упругие свойства нити при нагрузке и разгрузке заданы различными табличными зависимостями в координатах «относительная деформация» - «сила», что позволяет воспроизвести гистерезис.
График разгрузки масштабируется в зависимости от достигнутого значения максимальной силы при нагрузке и сдвигается в точку начала разгрузки (рис. THREAD_2). Коэффициент масштабирования по обеим координатам рассчитывается как отношение максимально достигнутого значения силы нагрузки Pm к максимальному заданному значению силы в табличной зависимости графика разгрузки Pmu.
|
|
|
Рис. THREAD_3. |
При повторной нагрузке на начальном этапе (e<em) упругие свойства воспроизводятся сначала по разгрузочной ветви петли гистерезиса до пересечения ее с нагрузочной ветвью. После достижения деформации e=em, соответствующей точке пресечения нагрузочной и разгрузочной ветвей (при e>em), упругие свойства нити в дальнейшем воспроизводятся по нагрузочной ветви.
Возможно задание предельной деформации («упругий предел»), до достижения которой нагрузка и разгрузка воспроизводятся по заданному графику нагрузочной фазы, таким образом, гистерезис отсутствует.
Графики нагрузки и разгрузки должны взаимно соответствовать друг другу:
1. В любой точке графика нагрузки после упругого предела пластическая деформация после разгрузки должна быть положительна.
2. Пластическая деформация (остаточная деформация после полной разгрузки) с ростом полной деформации нити должна монотонно увеличиваться.
Нить обладает инерционными свойствами и находится в поле силы тяжести Земли.
Степени свободы
|
1, 2, 3 |
Поступательные точки А1 в направлении глобальных координатных осей X,Y,Z. |
|
4, 5, 6 |
Поступательные точки А2 в направлении глобальных координатных осей X,Y,Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки А1 |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки А2 |
м |
- Rlmax... +RLmax Если длина элемента в недеформированном состоянии (параметр 7) равна нулю или отрицательна, то точки А1 и А2 в начальный момент времени не могут совпадать |
|
7 |
Длина нити в недеформированном состоянии |
м |
- Rlmax... +RLmax При отрицательном или нулевом значении этого параметра начальная длина нити определяется начальным расстоянием между точками А1 и А2 |
|
8 |
Площадь сечения нити |
м2 |
> 0 |
|
9 |
Плотность материала нити |
кг/м3 |
> 0 |
|
10 |
Признак учета силы тяжести |
- |
- Rlmax... +RLmax Если значение параметра равно единице, то модель воспроизводит силу тяжести элемента в направлении глобальной оси Z. |
|
11 |
Максимальная относительная деформация до достижения которой разгрузка производится по графику нагрузки («упругий предел относительной деформации) |
- |
³ 0 |
|
12 |
Маркер (численная величина, отделяющая одну таблицу значений от другой) |
|
- Rlmax... +RLmax |
|
13… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию графика зависимости осевой силы от относительной деформации нити при нагрузке. В каждой паре чисел: первое число – относительная деформация растяжения при нагрузке второе число – сила [Н] |
-, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение деформации должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении смещения аппроксимация должна обеспечивать нулевое значение силы. Модель игнорирует ветви графика нагрузки при отрицательных деформациях. |
|
… |
Маркер |
|
Равно значению параметра 12 |
|
… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию графика зависимости осевой силы от относительной деформации нити при разгрузке. В каждой паре чисел: первое число – относительная деформация растяжения при разгрузке второе число – сила [Н] |
м/с, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение деформации должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. Сила, соответствующая минимальной деформации разгрузки должна равняться нулю. |
ПРИМЕЧАНИЕ:
1. В любой точке графика нагрузки после упругого предела пластическая деформация после разгрузки должна быть положительна.
2. Пластическая деформация (остаточная деформация после полной разгрузки) с ростом полной деформации нити должна монотонно увеличиваться.
3. При превышении максимальной деформации, по сравнению с заданной в таблицах, сила рассчитывается путем экстраполяции последнего участка графика.
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Текущее расстояние между точками подсоединения |
м |
|
|
2 |
Текущая относительная деформация нити на растяжение (при сжатии равна нулю) |
|
|
|
3 |
Текущая абсолютная деформация нити на растяжение (при сжатии равна нулю) |
м |
|
|
4 |
Накопленная относительная пластическая деформация нити |
|
|
|
5 |
Накопленная абсолютная пластическая деформация нити |
м |
|
|
6 |
Упругая сила растяжения нити |
Н |
|
Стандартный графический образ
В натянутом состоянии нить изображается в виде отрезка БЕЛОГО цвета, соединяющего конечные точки нити. В режиме провисания нить отображается условно в виде ломаной КРАСНОГО цвета. Точка излома находится на оси параллельной оси Z и проходящей через середину отрезка. Величина провиса принимается приближенно равной половине разности между начальной и текущей длиной нити с учетом накопленной пластической деформации. Направление «провисания» ломаной – отрицательное по отношении к оси z. Плоскость провисания перпендикулярна плоскости xOy.
4.6.1.2. Перетекание нити через кольцо SRING
Отображаемые свойства
|
|
|
Рис. SRING_1. |
Модель предназначена для воспроизведения свойств сегмента упругой нити при его перетекании через кольцо. Начальная длина сегмента постоянна. Нить не воспринимает сжимающую нагрузку. Максимальная сила трения определяется по закону Эйлера. Модель воспроизводит силу трения покоя и силу трения скольжения. Модель учитывает гистерезис и инерционные свойства материала нити, а также силу тяжести нити. В крайних точках модель может контактировать с другими телами и связями. Модель не воспроизводит конфигурацию нити в ненатянутом состоянии.
Две точки A1 и A2, способные перемещаться в пространстве под действием внешних сил, связаны между собой упругой нитью, пропущенной через кольцо. Контакт между нитью и кольцом осуществляется в точке C, которая также может перемещаться в пространстве. Контакт между кольцом и нитью не может быть разомкнут.
Начальные значения длин частей сегмента между точкой контакта с кольцом c и точками подсоединения A1 и A2 (соответственно LCA1 и LCA2) должны быть таковы, чтобы в любой момент времени расчета сегмент полностью не прошел бы через кольцо. Расчет в этом случае будет завершен с выдачей диагностического сообщения
Упругие свойства нити при нагрузке и разгрузке заданы различными табличными зависимостями в координатах «относительная деформация» - «сила», что позволяет воспроизвести гистерезис.
|
|
|
Рис. SRING_2. |
График разгрузки масштабируется в зависимости от достигнутого значения максимальной силы при нагрузке и сдвигается в точку начала разгрузки (рис. SRING_2). Коэффициент масштабирования по обеим координатам рассчитывается как отношение максимально достигнутого значения силы нагрузки Pm к максимальному заданному значению силы в табличной зависимости графика разгрузки Pmu.
|
|
|
Рис. SRING_3. |
При повторной нагрузке на начальном этапе (e<em) упругие свойства воспроизводятся сначала по разгрузочной ветви петли гистерезиса до пересечения ее с нагрузочной ветвью. После достижения деформации e=em, соответствующей точке пресечения нагрузочной и разгрузочной ветвей (при e>em), упругие свойства нити в дальнейшем воспроизводятся по нагрузочной ветви.
Возможно задание предельной деформации («упругий предел»), до достижения которой нагрузка и разгрузка воспроизводятся по заданному графику нагрузочной фазы, таким образом, гистерезис отсутствует.
Графики нагрузки и разгрузки должны взаимно соответствовать друг другу:
1. В любой точке графика нагрузки после упругого предела пластическая деформация после разгрузки должна быть положительна.
2. Пластическая деформация (остаточная деформация после полной разгрузки) с ростом полной деформации нити должна монотонно увеличиваться.
Нить обладает инерционными свойствами и находится в поле силы тяжести Земли.
Степени свободы
|
1, 2, 3 |
Поступательные точки А1 в направлении глобальных координатных осей X,Y,Z. |
|
4, 5, 6 |
Поступательные точки А2 в направлении глобальных координатных осей X,Y,Z. |
|
7, 8, 9 |
Поступательные точки C в направлении глобальных координатных осей X,Y,Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки А1 |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки А2 |
м |
- Rlmax... +RLmax Точки А1 и А2 в начальный момент времени могут совпадать. В этом случае угол b между ветвями равен 0. Точки A1 и A2 всегда считаются расположенными по разные стороны кольца. |
|
7,8,9 |
начальные координаты точки C |
м |
- Rlmax... +RLmax Точка C не должна совпадать с точками A1 или A2. Начальные длины отрезков CA1 и CA2 следует подбирать таким образом, чтобы в процессе расчета эти длины не могли стать отрицательными. |
|
10 |
Коэффициент трения при перетекании нити через кольцо |
- |
> 0 |
|
11 |
Длина нити в недеформированном состоянии |
м |
- Rlmax... +RLmax При отрицательном или нулевом значении этого параметра начальная длина нити определяется суммой начальных расстояний между точкой C и точками А1 и А2 |
|
12 |
Площадь сечения нити |
м2 |
> 0 |
|
13 |
Плотность материала нити |
кг/м3 |
> 0 |
|
14 |
Признак учета силы тяжести |
- |
- Rlmax... +RLmax Если значение параметра равно единице, то модель воспроизводит силу тяжести элемента в направлении глобальной оси Z. |
|
15 |
Максимальная относительная деформация до достижения которой разгрузка производится по графику нагрузки («упругий предел относительной деформации) |
- |
³ 0 |
|
16 |
Маркер (численная величина, отделяющая одну таблицу значений от другой) |
|
- Rlmax... +RLmax |
|
17… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию графика зависимости осевой силы от относительной деформации нити при нагрузке. В каждой паре чисел: первое число – относительная деформация растяжения при нагрузке второе число – сила [Н] |
-, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение деформации должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении смещения аппроксимация должна обеспечивать нулевое значение силы. Модель игнорирует ветви графика нагрузки при отрицательных деформациях. |
|
… |
Маркер |
|
Равно значению параметра 12 |
|
… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию графика зависимости осевой силы от относительной деформации нити при разгрузке. В каждой паре чисел: первое число – относительная деформация растяжения при разгрузке второе число – сила [Н] |
м/с, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение деформации должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. Сила, соответствующая минимальной деформации разгрузки должна равняться нулю. |
ПРИМЕЧАНИЕ:
1. В любой точке графика нагрузки после упругого предела пластическая деформация после разгрузки должна быть положительна.
2. Пластическая деформация (остаточная деформация после полной разгрузки) с ростом полной деформации нити должна монотонно увеличиваться.
3. При превышении максимальной деформации, по сравнению с заданной в таблицах, сила рассчитывается путем экстраполяции последнего участка графика.
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Текущее расстояние между точками С и А1. |
м |
|
|
2 |
Текущее расстояние между точками С и А2. |
м |
|
|
3 |
Текущая длина нити. |
м |
|
|
4 |
Текущая средняя относительная деформация нити на растяжение (при сжатии равна нулю) |
|
|
|
5 |
Текущая средняя абсолютная деформация нити на растяжение (при сжатии равна нулю) |
м |
|
|
6 |
Накопленная средняя относительная пластическая деформация нити |
|
|
|
7 |
Накопленная средняя абсолютная пластическая деформация нити |
м |
|
|
8 |
Средняя сила растяжения нити |
Н |
|
|
9 |
Сила трения |
Н |
|
|
10 |
Упругая сила растяжения нити на участке между точками C и A1 |
Н |
|
|
11 |
Упругая сила растяжения нити на участке между точками C и A2 |
Н |
|
Стандартный графический образ
Графический образ по умолчанию представляет собой два отрезка белого цвета, соединяющей точки A1,С и A2,С когда нить натянута. В случае провисания ветвей отрезки превращаются в ломанные красного цвета, соединяющие эти точки, длиной равной длине ветви в недеформированном состоянии. Точка излома находится на оси параллельной оси Z и проходящей через середину отрезка. Величина провиса принимается приближенно равной половине разности между начальной и текущей длиной нити с учетом накопленной пластической деформации. Направление «провисания» ломаной – отрицательное по отношении к оси z. Плоскость провисания перпендикулярна плоскости xOy. При пролете цвет отрезков изменяется на желтый.
4.6.1.3. Инерционная катушка RETRTA
Отображаемые свойства
|
|
|
Рис. RETRTA_1. |
Модель предназначена для воспроизведения свойств сегмента упругой нити соединенного с инерционной катушкой. Сегмент заключен между точкой А1 – точкой подсоединения к другому сегменту нити и точкой A2 – точкой входа нити в инерционную катушку. Длина сегмента нити А1A2 переменна и зависит от свойств инерционной катушки и взаимодействия сегмента с другими сегментами нити в точке А1 и внешними телами, на которых закреплена катушка в точке A2. Точки А1 и A2 могут совершать произвольное перемещение в пространстве под действием внешних сил.
Нить не воспринимает сжимающую нагрузку. Упругие свойства нити при нагрузке и разгрузке заданы различными табличными зависимостями в координатах «относительная деформация» - «сила», что позволяет воспроизвести гистерезис. Модель учитывает также инерционные свойства материала нити, а также силу тяжести нити. Длина сегмента нити в любой момент времени должна неотрицательна (точка А1 при любых условиях не может быть втянута вовнутрь катушки). Расчет в этом случае прекращается с выдачей диагностического сообщения. Модель не воспроизводит конфигурацию нити в ненатянутом состоянии.
В начальный момент времени сегмент нити считается натянутым силой, равной значению силы при нулевом выбеге в таблице характеристики "шпулевого" эффекта катушки (см. ниже).
Катушка воспроизводит свободный выбег нити с некоторой силой натяжения и процесс запирания, сопровождаемый на начальном этапе "шпулевым" эффектом. Начало процесса запирания катушки, сопровождаемого шпулевым эффектом, характеризуется превышением ускорения выбега нити некоторого предельного значения. Возможно задание задержки срабатывания катушки по отношению к моменту возникновения критического ускорения. Если в период задержки включения ускорение выбега становится меньше критического, то срабатывания катушки не происходит. До момента срабатывания катушки и в процессе воспроизведения шпулевого эффекта нить считается абсолютно упругой и гистерезис не воспроизводится.
Шпулевый эффект заключается в зависимости силы натяжения нити от величины выбега при срабатывании катушки. Эта зависимость задается таблицей, состоящей из пар чисел, первое из которых является величиной выбега нити после срабатывания катушки, а вторая - соответствующая этому выбегу величина силы натяжения нити. Минимальная величина силы в таблице является величиной силы натяжения нити на этапе свободного выбега (см. выше). Максимальное значение выбега в таблице соответствует моменту полного запирания катушки. Если в процессе моделирования выбег при срабатывании не достигнув максимального значения станет уменьшаться и возвратится к нулевому значению, то модель перейдет в режим воспроизведения свободного выбега.
Шпулевый эффект завершается полным запиранием катушки, при котором прекращается как выбег нити из катушки, так и ее возможное втягивание внутрь. Модель в этом случае начинает работать как сегмент нити постоянной начальной длины с учетом произошедшего суммарного выбега.
|
|
|
Рис. RETRTA_2. |
График разгрузки масштабируется в зависимости от достигнутого значения максимальной силы при нагрузке и сдвигается в точку начала разгрузки (Рис. RETRTA_2). Коэффициент масштабирования по обеим координатам рассчитывается как отношение максимально достигнутого значения силы нагрузки Pm к максимальному заданному значению силы в табличной зависимости графика разгрузки Pmu.
При повторной нагрузке на начальном этапе (e<em) упругие свойства воспроизводятся сначала по разгрузочной ветви петли гистерезиса до пересечения ее с нагрузочной ветвью. После достижения деформации e=em, соответствующей точке пресечения нагрузочной и разгрузочной ветвей (при e>em), упругие свойства нити в дальнейшем воспроизводятся по нагрузочной ветви.
Возможно задание предельной деформации («упругий предел»), до достижения которой нагрузка и разгрузка воспроизводятся по заданному графику нагрузочной фазы, таким образом, гистерезис отсутствует.
|
|
|
Рис. RETRTA_3. |
Графики нагрузки и разгрузки должны взаимно соответствовать друг другу:
1. В любой точке графика нагрузки после упругого предела пластическая деформация после разгрузки должна быть положительна.
2. Пластическая деформация (остаточная деформация после полной разгрузки) с ростом полной деформации нити должна монотонно увеличиваться.
Степени свободы
|
1, 2, 3 |
Поступательные точки А1 в направлении глобальных координатных осей X,Y,Z. |
|
4, 5, 6 |
Поступательные точки А2 в направлении глобальных координатных осей X,Y,Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки А1 |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки A2 |
м |
- Rlmax... +RLmax Точки А1 и A2 в начальный момент времени не могут совпадать. |
|
7 |
Критическое ускорение выбега нити из катушки, характеризующее момент начала срабатывания |
м/c2 |
> 0 |
|
8 |
Время задержки срабатывания |
с |
³ 0 |
|
9 |
Площадь сечения нити |
м2 |
> 0 |
|
10 |
Плотность материала нити |
кг/м3 |
> 0 |
|
11 |
Признак учета силы тяжести |
- |
- Rlmax... +RLmax Если значение параметра равно единице, то модель воспроизводит силу тяжести элемента в направлении глобальной оси Z. |
|
12 |
Максимальная относительная деформация до достижения которой разгрузка производится по графику нагрузки («упругий предел относительной деформации) |
- |
³ 0 |
|
13 |
Маркер (численная величина, отделяющая одну таблицу значений от другой) |
|
- Rlmax... +RLmax |
|
14… |
Таблица 1 - пары чисел, определяющие кусочно-линейную аппроксимацию графика зависимости осевой силы от относительной деформации нити при нагрузке после запирания катушки. В каждой паре чисел: первое число – относительная деформация растяжения при нагрузке второе число – сила [Н] |
-, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение деформации должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. При нулевом значении смещения аппроксимация должна обеспечивать нулевое значение силы. Модель игнорирует ветви графика нагрузки при отрицательных деформациях. |
|
… |
Маркер |
|
Равно значению параметра 13 |
|
… |
Таблица 2 - пары чисел, определяющие кусочно-линейную аппроксимацию графика зависимости осевой силы от относительной деформации нити при разгрузке после запирания катушки. В каждой паре чисел: первое число – относительная деформация растяжения при разгрузке второе число – сила [Н] |
-, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение деформации должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. Сила, соответствующая минимальной деформации разгрузки должна равняться нулю. |
|
… |
Маркер |
|
Равно значению параметра 13 |
|
… |
Таблица 3 - пары чисел, определяющие кусочно-линейную аппроксимацию графика зависимости силы натяжения нити от величины выбега при срабатывании катушки (характеристика "шпулевого" эффекта). В каждой паре чисел: первое число – величина выбега [м] второе число – сила [Н] |
м, H |
Таблица должна содержать не менее 4-х значений (2 пары). Значение выбега должно возрастать от первой пары к последней. Не допускается ниспадающих участков аппроксимации. Все значения в таблице должны быть неотрицательными. Сила, соответствующая нулевому выбегу принимается равной силе натяжения нити при свободном выбеге. Максимальное значение выбега в таблице соответствует полному замыканию катушки |
ПРИМЕЧАНИЕ:
1. В любой точке графика нагрузки после упругого предела пластическая деформация после разгрузки должна быть положительна.
2. Пластическая деформация (остаточная деформация после полной разгрузки) с ростом полной деформации нити должна монотонно увеличиваться.
3. При превышении максимальной деформации, по сравнению с заданной в таблицах 1 и 2, сила рассчитывается путем экстраполяции последнего участка графика.
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Текущее расстояние между точками А1 и A2 |
м |
|
|
2 |
Текущая недеформированная длина нити |
м |
|
|
3 |
Текущая относительная деформация нити на растяжение (при сжатии равна нулю) |
|
|
|
4 |
Текущая абсолютная деформация нити на растяжение (при сжатии равна нулю) |
м |
|
|
5 |
Накопленная относительная пластическая деформация нити |
|
|
|
6 |
Накопленная абсолютная пластическая деформация нити |
м |
|
|
7 |
Общий выбег нити из катушки с учетом деформации |
м |
|
|
8 |
Выбег нити на участке срабатывания с учетом деформации |
м |
|
|
9 |
Сила натяжения нити |
Н |
|
|
10 |
Флаг состояния нити 1 – свободный выбег 2 – срабатывание со шпулевым эффектом 3 – замыкание катушки нагрузка нити 4 – замыкание катушки, разгрузка нити 5 – замыкание катушки, провисание нити |
|
|
Стандартный графический образ
На этапе выбега нить отображается отрезком желтого цвета на этапе срабатывания - синего, натяжения после срабатывания – белого, разгрузки после срабатывания – зеленого. В режиме провисания нить отображается условно в виде ломаной красного цвета Точка излома находится на оси параллельной оси Z и проходящей через середину отрезка. Величина провиса принимается приближенно равной половине разности между начальной и текущей длиной нити с учетом накопленной пластической деформации. Направление «провисания» ломаной – отрицательное по отношении к оси z.
5. Элементы сплошной среды
5.1. Плоские элементы
5.1.1. Стержневые элементы
5.1.1.1. Балочный идеально упругий элемент с малыми деформациями BALKA
Отображаемые свойства
Модель двухмерного прямолинейного стержня постоянного сечения, способного упруго деформироваться путем растяжения (сжатия), изгиба в плоскости своего движения (см. рис. BALKA_1).
Балочный элемент способен перемещаться и занимать любое положение на координатной плоскости, определяемое линейными и угловыми координатами его концов.
Степени свободы
|
1,2 - |
поступательные точки A по осям OX, OY; |
|
3 - |
вращательная точки A; |
|
4,5 - |
поступательные точки B по осям OX, OY; |
|
6 - |
вращательная точки B. |
|
|
|
|
BALKA_1. |
Балочный идеально упругий элемент с малыми деформациями. Степени свободы элемента: 1, 2 – поступательные точки А по осям OX, OY; 3 – вращательные точки А; 4, 5 – поступательные точки B по осям OX, OY; 6 – вращательная точки B; Xa, Ya – начальные координаты точки А; Xb, Yb – начальные координаты точки B; m – масса балки; J – геометрический момент инерции сечения стержня относительно главной оси, перпендикулярной плоскости, в которой движется элемент; F – площадь поперечного сечения; E – модуль упругости материала стержня. |
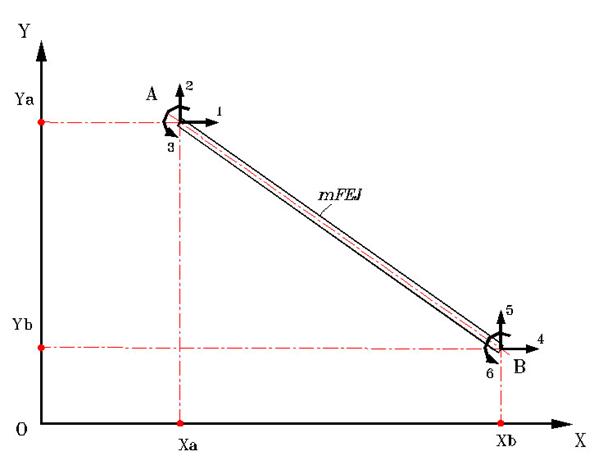
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2 |
Начальные координаты точки A по осям OX, OY |
м |
-RLmax... +RLmax |
|
3,4 |
Начальные координаты точки B по осям OX, OY |
м |
-RLmax... +RLmax |
|
5 |
Масса балки |
м |
0 ... +RLmax |
|
6 |
Отношение расстояния от точки А до центра масс (в направлении от точки A к точке B) к длине отрезка AB |
|
1/3 ... 2/3 |
|
7 |
Геометрический момент инерции поперечного балки |
м4 |
0 ... L4 |
|
8 |
Площадь поперечного сечения |
м2 |
0 ... L2 |
|
9 |
Модуль упругости материала |
Па |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
6 |
осевое усилие в стержне |
Н |
|
|
7 |
поперечное усилие в стержне |
Н |
|
|
11 |
потенциальная энергия деформации элемента |
Дж |
|
|
12 |
потенциальная энергия растяжения элемента |
Дж |
|
|
13 |
потенциальная энергия изгиба элемента |
Дж |
|
Особые ситуации
В случае, если в ходе вычислений текущая длина элемента становится равной 0, осуществляется аварийный выход из модели.
5.2. Пространственные элементы
5.2.1. Стержневые элементы
5.2.1.1. Растяжимо-сжимаемый стержневой идеально упругий трехмерный элемент STERG
Модель пространственного прямолинейного стержня (рис. STERG_1), способного упруго деформироваться путем растяжения (сжатия). Стержневой элемент способен перемещаться и занимать любое положение в трехмерном пространстве, которое определяется текущими координатами его концов.
|
|
|
|
STERG_1. |
Пространственный идеально упругий стержневой элемент. Степени свободы элемента: 1, 2, 3 – поступательные точки А по осям OX, OY, OZ; 4, 5, 6 – поступательные точки B по осям OX, OY, OZ; Xa, Ya, Za – начальные координаты точки А; Xb, Yb, Zb – начальные координаты точки B; |
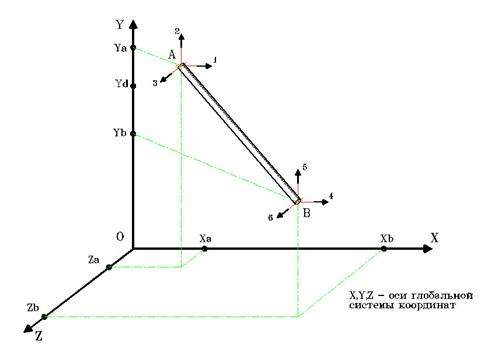
Степени свободы
|
1 - |
поступательная в направлении оси OX точки A элемента; |
|
2 - |
поступательная в направлении оси OY точки A элемента; |
|
3 - |
поступательная в направлении оси OZ точки A элемента; |
|
4 - |
поступательная в направлении оси OX точки B элемента; |
|
5 - |
поступательная в направлении оси OY точки B элемента; |
|
6 - |
поступательная в направлении оси OZ точки B элемента. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки A по осям OX, OY, OZ |
м |
-RLmax... +RLmax |
|
4,5,6 |
Начальные координаты точки B по осям OX, OY, OZ |
м |
-RLmax... +RLmax |
|
7 |
Масса стержня |
кг |
0... +RLmax |
|
8 |
отношение расстояния от точки А до центра масс (в направлении от точки А к точке B) к длине отрезка AB |
|
1/3 ... 2/3 |
|
9 |
площадь поперечного сечения элемента |
м2 |
0... +RLmax |
|
10 |
модуль упругости материала стержня |
Па |
0... +RLmax |
Примечание. Начальная длина должна быть больше 0.
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
текущая деформация* |
м |
-RLmax... +RLmax |
|
2 |
текущее продольное усилие* |
Н |
-RLmax... +RLmax |
*) Примечание. Положительное значение соответствует растяжению, отрицательное - сжатию.
Особые ситуации
В случае, если в ходе вычислений текущая длина элемента становится равной 0, осуществляется аварийный выход из модели.
5.2.1.2. Пространственный упругий балочный элемент с заданием характеристик поперечного сечения в виде моментов инерции и площади сечения BAL3DJ, BAL3DK
Отображаемые свойства
Модель пространственного прямолинейного балочного элемента постоянного поперечного сечения, способного упруго деформироваться путем растяжения (сжатия), изгиба в плоскостях главных осей сечения и кручения вокруг продольной оси. В коротком балочном элементе BAL3DK наряду с выше названными деформациями возможны также деформации сдвига. По выбору типа балочного элемента для моделирования задач механики могут быть даны следующие рекомендации. На рис. BAL3D_1 приводится кривая влияния сдвига на деформацию балки при изгибе в зависимости от ее длины. Определялся максимальный прогиб для ряда длин консольной балки круглого поперечного сечения при действии сосредоточенной силы на свободном конце. Кривая построена на основание сравнения результатов расчета балок BAL3DJ и BAL3DK. Сдвиг, сопровождающий деформацию изгиба, становится значительным при L4 < 1000*JX’ (L4 < 1000*JY’). Поэтому при меньших значениях длины балки рекомендуется использовать элемент BAL3DK.
|
|
|
|
BAL3D_1. |
Кривая влияния сдвига на деформацию балки при изгибе и зависимости от ее длины. Δд – максимальный прогиб балки BAL3DJ; Δк – максимальный прогиб балки BAL3DK; L – длина балки; Jx – осевой момент инерции поперечного сечения балки. |
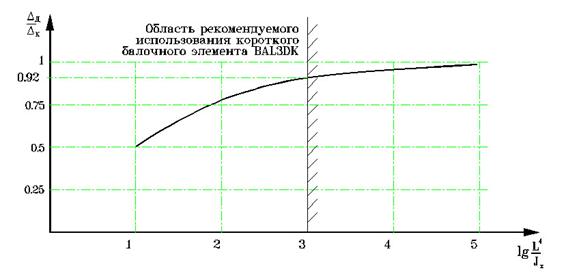
Балочный элемент способен перемещаться и занимать любое положение в трехмерном пространстве, которое определяется текущими координатами его концов.
Локальная система координат (ЛКС) балки определяется следующим образом (рис. BAL3D_2). Осью OZ’ ЛКС (осью балки) считается луч, выходящий из точки А по направлению к точке В. Вспомогательная точка D определяет первую главную плоскость инерции балки.
|
|
|
|
BAL3D_2. |
Пространственный упругий балочный элемент. Определение осей локальной системы координат. Степени свободы элемента: 1, 2, 3 – поступательные точки А по осям OX, OY, OZ; 4, 5, 6 –вращательные точки А вокруг осей OX, OY, OZ; 7, 8, 9 – поступательные точки B по осям OX, OY, OZ; 10, 11, 12 –вращательные точки B вокруг осей OX, OY, OZ; Xa, Ya, Za – начальные координаты точки А; Xb, Yb, Zb – начальные координаты точки B; Xd, Yd, Zd – координаты вспомогательной точки D; |
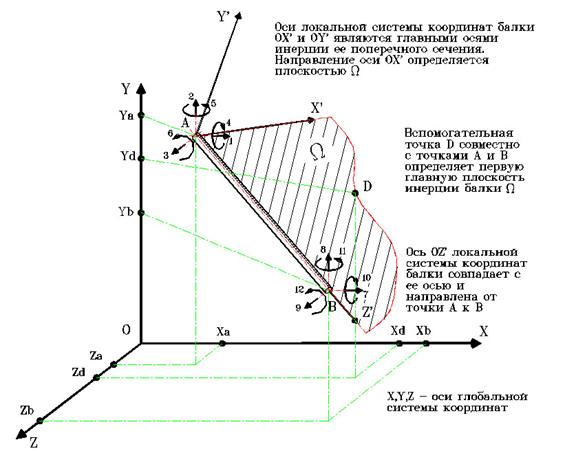
Степени свободы
|
1,2,3 - |
поступательные точки A по осям OX, OY, OZ; |
|
4,5,6 - |
вращательные точки A вокруг осей OX, OY, OZ; |
|
7,8,9 - |
поступательные точки B по осям OX, OY, OZ; |
|
10,11,12 - |
вращательные точки B вокруг осей OX, OY, OZ. |
Параметры элемента BAL3DJ
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки A по осям OX, OY, OZ |
м |
-RLmax... +RLmax |
|
4,5,6 |
Начальные координаты точки B по осям OX, OY, OZ |
м |
-RLmax... +RLmax |
|
7,8,9 |
Начальные координаты вспомогательной точки D |
м |
-RLmax... +RLmax |
|
10 |
момент инерции поперечного сечения Jx' |
м4 |
0 ... 10 * L4 |
|
11 |
момент инерции поперечного сечения Jу' |
м4 |
0 ... 10 * L4 |
|
12 |
момент инерции при кручении Jкр |
м4 |
0 ... 10 * L4 |
|
13 |
площадь поперечного сечения |
м2 |
0 ... +RLmax |
|
14 |
модуль упругости материала элемента |
Па |
0 ... +RLmax |
|
15 |
коэффициент Пуассона |
|
] 0 ... 0.5 [ |
|
16 |
плотность материала |
кг/м3 |
0 ... +RLmax |
Примечание. Если вспомогательная точка D, заданная пользователем, лежит на оси Z' ЛКС, тогда положение первой главной плоскости инерции программа устанавливает по умолчанию.
Параметры элемента BAL3DK
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки A по осям OX, OY, OZ |
м |
-RLmax... +RLmax |
|
4,5,6 |
Начальные координаты точки B по осям OX, OY, OZ |
м |
-RLmax... +RLmax |
|
7,8,9 |
Начальные координаты вспомогательной точки D |
м |
-RLmax... +RLmax |
|
10 |
момент инерции поперечного сечения Jx' |
м4 |
0 ... +RLmax |
|
11 |
момент инерции поперечного сечения Jу' |
м4 |
0 ... +RLmax |
|
12 |
момент инерции при кручении Jкр |
м4 |
0 ... +RLmax |
|
13 |
площадь поперечного сечения |
м2 |
0 ... +RLmax |
|
14 |
коэффициент влияния поперечного сечения на сдвиговую деформацию по локальной оси X' |
|
0 ... +RLmax |
|
15 |
коэффициент влияния поперечного сечения на сдвиговую деформацию по локальной оси Y' |
|
0 ... +RLmax |
|
16 |
модуль упругости материала элемента |
Па |
0 ... +RLmax |
|
17 |
коэффициент Пуассона |
|
] 0 ... 0.5 [ |
|
18 |
плотность материала |
кг/м3 |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
поперечное усилие в точке A по оси X' |
Н |
|
|
2 |
поперечное усилие в точке A по оси Y' |
Н |
|
|
3 |
продольное усилие в точке A |
Н |
|
|
4 |
изгибающий момент в точке A относительно оси X' |
Н |
|
|
5 |
изгибающий момент в точке A относительно оси Y' |
Н |
|
|
6 |
крутящий момент в точке A |
Н |
|
|
7 |
изгибающий момент в точке B относительно оси X' |
Н |
|
|
8 |
изгибающий момент в точке B относительно оси Y' |
Н |
|
|
9 |
крутящий момент в точке B |
Н |
|
|
10 |
осевая деформация растяжения-сжатия |
|
|
|
11 |
угол скручивания по оси балки |
рад |
|
|
12 |
изгибная деформация в точке A относительно оси X' |
|
|
|
13 |
изгибная деформация в точке A относительно оси Y' |
|
|
|
14 |
изгибная деформация в точке B относительно оси X' |
|
|
|
15 |
изгибная деформация в точке B относительно оси Y' |
|
|
|
16,17,18 |
направляющие косинусы оси X' ЛСК балки |
|
|
Примечания. Силовые факторы и деформации - в локальной системе координат балки (ЛСК). Под изгибной деформацией относительно оси X' или Y' ЛСК понимается тангенс угла отклонения проекции упругой линии балки на плоскость, перпендикулярную соответствующей оси ЛСК, от оси балки.
Особые ситуации
Почти все приемы, характерные для поступательного движения, остаются справедливыми и при работе с тремя внешними угловыми степенями свободы пространственного элемента BAK3DJ (BAL3DK). Некорректными будут операции прямого кинематического воздействия с помощью источников кинематического воздействия, предназначенных для плоского вращения. При необходимости передать вращение с одномерных или плоских элементов на пространственные, нужно использовать связующие элементы типа участка вала (элемент связи SV13W), имеющего на одном конце вращательную степень свободы, а на втором - три вращательных степени свободы вокруг координатных осей.
5.2.2. Пластины
5.2.2.1. Пространственная треугольная упругая пластина, работающая на растяжение-сжатие и изгиб PLSTU
Отображаемые свойства
Треугольный пространственный элемент с возможностью произвольного перемещения и малыми упругими деформациями растяжения-сжатия и изгиба. Модель пространственной треугольной упругой пластины представлена на рис. PLSTU.
|
|
|
|
PLSTU_1. |
Пространственная треугольная упругая пластина. Степени свободы элемента: 1, 2, 3 – поступательные точки А по осям OX, OY, OZ; 4, 5, 6 – поступательные точки B по осям OX, OY, OZ; 7, 8, 9 – поступательные точки C по осям OX, OY, OZ; 10 – вращательная середины стороны AB; 11 – вращательная середины стороны BC; 12 – вращательная середины стороны CA; Xa, Ya, Za – начальные координаты точки А; Xb, Yb, Zb – начальные координаты точки B; Xc, Yc, Zc – начальные координаты точки C; |
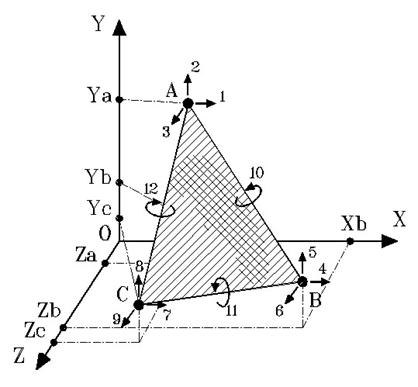
Степени свободы
|
1,2,3 - |
поступательные точки A элемента по осям OX,OY,OZ; |
|
4,5,6 - |
поступательные точки B элемента по осям OX,OY,OZ; |
|
7,8,9 - |
поступательные точки C элемента по осям OX,OY,OZ; |
|
10 - |
вращательная середины стороны AB; |
|
11 - |
вращательная середины стороны BC; |
|
12 - |
вращательная середины стороны CA; |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки A по осям ОX,ОY,ОZ |
м |
-RLmax... +RLmax |
|
4,5,6 |
Начальные координаты точки B по осям ОX,ОY,ОZ |
м |
-RLmax... +RLmax |
|
7,8,9 |
Начальные координаты точки С по осям ОX,ОY,ОZ |
м |
-RLmax... +RLmax |
|
10 |
Толщина элемента |
м |
0 ... +RLmax |
|
11 |
Модуль упругости материала злемента |
Па |
0 ... +RLmax |
|
12 |
Коэффициент Пуассона |
- |
0 ... 0.5 |
|
13 |
Плотность материала |
кг/м3 |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
прогиб в центре тяжести пластины |
м |
|
|
2 |
эквивалентое напряжение на нижней поверхности пластины |
Па |
|
|
3 |
эквивалентое напряжение на верхней поверхности пластины |
Па |
|
|
4 |
максимальное эквивалентное напряжение |
Па |
|
|
5 |
показатель н.с. на нижней поверхности пластины |
|
|
|
6 |
показатель н.с. на верхней поверхности пластины |
|
|
|
7, 8, 9 |
компоненты тензора напряжений на нижней поверхности пластины в ЛСК |
|
|
|
10,11,12 |
компоненты тензора напряжений на верхней поверхности пластины в ЛСК |
|
|
|
13 |
удельная потенциальная энергия деформации |
|
|
|
14 |
общая потенциальная энергия деформации пластины |
Дж |
|
|
15 |
общая энергия, переданная пластине |
Дж |
|
Примечание. Толщина пластины должна соответствовать размерам элемента. Если квадрат толщины превышает площадь элемента, значение толщины считается недопустимо большим.
Особые ситуации
Если в ходе вычислений текущая площадь пластина становится близкой к нулю, то осуществляется аварийный выход из модели.
6. Контактные элементы
6.1. Одномерные элементы
6.1.1.1. Одномерный элемент, отражающий упругое контактное взаимодействие между двумя телами и препятствующий положительному смещению первого тела относительно второго UPRL
Отображаемые свойства
Элемент служит для описания контактного взаимодействия двух тел, движение каждого из которых описывается одной степенью свободы. В общем случае в начальный момент времени между телами имеется зазор и усилие в контакте отсутствует. Возникающее после выборки зазора контактное усилие пропорционально величине контактной деформации:
Fупр = K * (( X1 - X2 ) - d ),
, где K - коэффициент контактной упругости;
d - начальный зазор;
X1 - перемещение первого тела;
X2 - перемещение второго тела.
На рис. UPR_1. показаны расчетные схемы для положительной и отрицательной величин зазора, а также зависимость контактного усилия от взаимного смещения тел (X1 - X2) в этих случаях. При использовании элемента UPRL нужно учесть, что взаимное положение контактирующих тел определяется не координатами тел, как в большинстве других контактных элементов, а порядком задания степеней свободы этих тел в описании структуры фрагмента. Элемент всегда препятствует положительному смещению первой степени свободы относительно второй.
|
|
|
|
Рис. UPR_1. |
Одномерный односторонний идеально упругий контактный элемент UPRL. Показаны расчетные схемы для случаев положительного и отрицательного начального зазора между контактирующими телами и соответствующие зависимости усилия взаимодействия от взаимного смещения тел. |
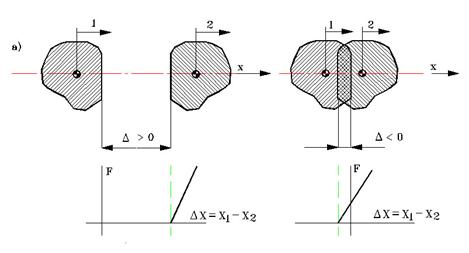
Некоторые типичные случаи применения элемента (различные случаи относительного начального расположения контактирующих тел при одномерном и плоском движении) изображены на рис. UPR_2.
|
1 - |
вращательная (поступательная) первого тела; |
|
2 - |
вращательная (поступательная) второго тела. |
Степени свободы
|
Расчетная схема процесса |
Описание структуры на PradiSlang |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. UPR_2. |
Некоторые типичные случаи применения односторонних контактных элементов (на примере элемента UPRL). |
|

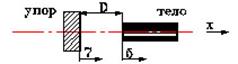
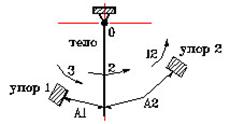
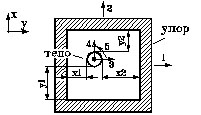
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
начальная величина зазора |
м или рад |
- Rlmax... +RLmax |
|
2 |
контактная жесткость элемента |
Н/м или Н*м/рад |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
текущая величина зазора (отрицательное значение соответствует внедрению первого тела во второе) |
м |
|
6.1.1.2. Одномерный контактный элемент с упруго-пластической характеристикой и возможностью разрушения UPRC
Отображаемые свойства
Элемент служит для описания контактного взаимодействия двух тел, движение каждого из которых описывается одной степенью свободы. В отличие от элемента UPRL характеристика контакта является упруго-пластической (см. рис. UPR_3). Если деформация элемента превышает величину разрушающей деформации, то элемент "разрушается" (связь между степенями свободы теряется). В дальнейшем элемент считается разрушенным.
Элемент всегда препятствует положительному смещению первой степени свободы относительно второй. Способ применения элемента аналогичен способу применения элемента UPRL.
|
|
|
|
Рис. UPR_1. |
Одномерный односторонний упруго-пластический контактный элемент с разрушением. Показаны расчетные схемы для случаев положительного и отрицательного зазора между контактирующими телами и соответствующие зависимости усилия взаимодействия от взаимного смещения тел. Δp – деформация, разрушающая элемент; Fпл – усилие взаимодействия, соответствующее выходу элемента на участок пластических деформаций |
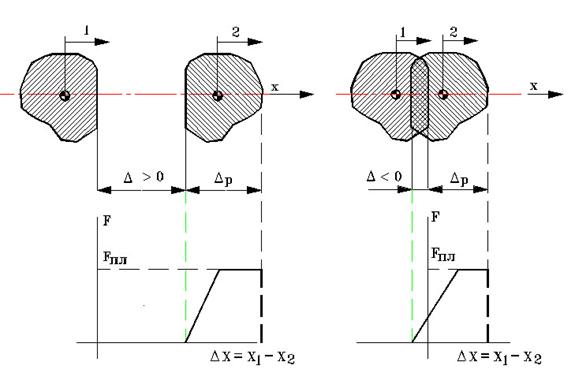
Степени свободы
|
1 - |
вращательная (поступательная) первого тела; |
|
2 - |
вращательная (поступательная) второго тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
начальная величина зазора (D) |
м или рад |
- Rlmax... +RLmax |
|
2 |
контактная жесткость элемента |
Н/м или Н*м/рад |
0 ... +RLmax |
|
3 |
усилие перехода элемента в пластическое состояние |
Н или Н*м |
0 ... +RLmax |
|
4 |
разрушающая деформация элемента (Dp) |
м или рад |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
текущая величина зазора - расстояния между недеформированными поверхностями контактирующих тел (отрицательное значение соответствует внедрению первого тела во второе) |
м или рад |
|
6.2. Двухмерные элементы
6.2.1.1. Элемент, описывающий контактное взаимодействие точки с окружностью KNTO
Отображаемые свойства
Элемент служит для описания контактного взаимодействия точки (на рис. KNTO_1 - точка C) с окружностью. Движение окружности в плоскости задается поступательными перемещениями ее центра (на рис. KNTO_1 - точка O). Контактное усилие пропорционально радиальной деформации элемента и направлено по радиусу, соединяющему центр окружности с точкой C. Сила трения в контакте не учитывается.
Некоторые типичные случаи применения элемента (различные случаи относительного начального расположения контактирующих тел при одномерном и плоском движении) изображены на рис. UPR_2.
|
|
|
|
Рис. KNTO_1. |
Геометрические параметры и степени свободы контактного элемента «точка с окружностью»: Xc, Yc – начальные координаты контактной точки; Xo, Yo – начальные координаты центра контактной окружности; D – диаметр контактной окружности. |
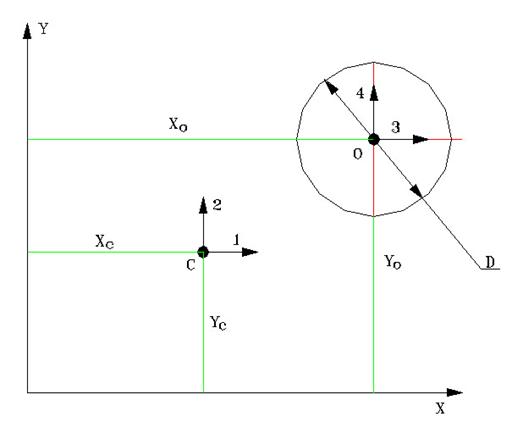
Степени свободы
|
1 - |
поступательная точки C по оси X; |
|
2 - |
поступательная точки C по оси Y; |
|
3 - |
поступательная точки O по оси X; |
|
4 - |
поступательная точки O по оси Y. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2 |
начальные координаты точки C (Xc, Yc) |
м |
- Rlmax... +RLmax |
|
3,4 |
начальные координаты точки O(Xo, Yo) |
м |
- Rlmax... +RLmax |
|
5 |
диаметр контактной окружности (D) |
м |
- Rlmax... +RLmax |
|
6 |
жесткость контакта |
Н/м или Н*м/рад |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
текущая величина зазора (отрицательное значение соответствует внедрению первого тела во второе) |
м |
|
|
2 |
текущая величина контактного усилия |
Н |
|
6.2.1.2. Элемент, описывающий контактное взаимодействие точки с плоской линией, контур которой состоит из последовательности N отрезков KONT
Отображаемые свойства
Контактное взаимодействие точки, движущейся в плоскости, и некоторого плоского тела, граница которого представляется совокупностью N отрезков. Движение контактной границы определяется перемещением жестко связанной с ним точки O, имеющей две степени свободы поступательного перемещения и одну степень свободы вращательного движения. При описании контактной линии как двухсторонней, ограничивается перемещение точки C в обе стороны по нормали к линии контакта (моделируется движение по направляющей). При описании односторонней линии контакта координаты отрезков, составляющих линию контакта, задаются в такой последовательности, чтобы при движении вдоль контактной линии контактная область оставалась слева. Контактная линия должна состоять как минимум из одного отрезка. Точка C, контакт с которой отслеживается, обладает двумя степенями свободы поступательного движения (рис.KONT_1).
|
|
|
|
Рис. KONT_1. |
Геометрические параметры и степени свободы контактного элемента «точка с ломаной»: Xc, Yc – начальные координаты контактирующей точки (точка С); Xo, Yo – начальные координаты точки, с движением которой связано движение контактного участка (точка О); Xi, Yi – начальные координаты i-ой точки контактного контура; 1, 2 – перемещения контактирующей точки; 3, 4, 5 – перемещения точки, с которой связан контактный участок. |
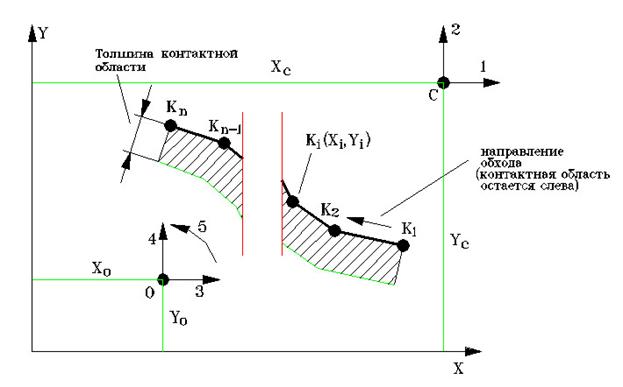
При возникновении контакта сила контактного взаимодействия имеет нормальную и касательную составляющие. Нормальная составляющая пропорциональна величине "проникновения" точки C внутрь контактной области. Коэффициент пропорциональности определяется задаваемой нормальной жесткостью контакта. Касательная составляющая моделирует сухое трение скольжения в пятне контакта.
Зоны влияния соседних отрезков, составляющих контактную линию, разделяются биссектрисой угла, образуемого этими отрезками (рис. KONT_2.а.). В случае, если точка C пересечет эту биссектрису уже в ходе контакта, направление контактного усилия изменится и будет определяться тем отрезком, в зоне влияния которого находится контактная точка в данный момент. Для того, чтобы зона влияния каждого из соседних отрезков контактной линии не была слишком мала, угол между соседними отрезками в этом элементе должен быть не меньше, чем 60 градусов.
Важным параметром при описании элемента является толщина контактной области (области, находясь в которой, контактная точка считается взаимодействующей с контактным участком). При назначении величины этого параметра желательно избежать двух крайностей. Слишком малая толщина контактной области может привести к "проскакиванию" контактной точки через контактную область.
Неоправданно большая толщина контактной области может привести к возникновению перекрывающихся зон влияния контактных отрезков, а в некоторых случаях - к возникновению зон, в которых контактная точка будет втягиваться внутрь контактной области (рис. KONT_2.б.).
В случае, если контактная точка находится в зоне влияния двух и более отрезков, контактное усилие будет определяться отрезком с меньшим номером (отрезком, координаты которого при описании элемента заданы раньше).
|
|
|
|
Рис. KONT_2. |
Особенности элемента KONT: а) границы зоны влияния соседних контактных участков; б) случай самопересечения элемента (зона влияния одного из участков пересекает границу контактной области). |
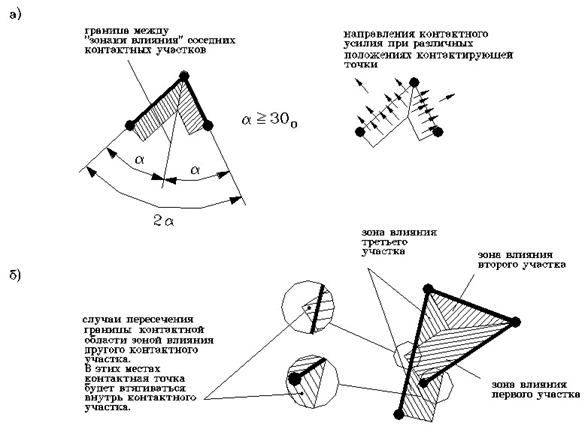
Степени свободы
|
1 - |
поступательная точки C по оси OX; |
|
2 - |
поступательная точки C по оси OY; |
|
3 - |
поступательная точки O по оси OX; |
|
4 - |
поступательная точки O по оси OY; |
|
5 - |
вращательная точки O. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2 |
начальные координаты точки C по осям OX, OY |
м |
- Rlmax... +RLmax |
|
3,4 |
начальные координаты точки O по осям OX, OY |
м |
- Rlmax... +RLmax |
|
5 |
толщина контактной области |
м |
0 ... +RLmax |
|
6 |
Нормальная жесткость контакта |
Н/м или Н*м/рад |
0 ... +RLmax |
|
7 |
коэффициент трения скольжения |
|
0 ... +RLmax |
|
8 |
признак одностороннего или двухстороннего контакта |
|
1 или 2 |
|
9,10 |
начальные координаты 1-й точки контактной линии по осям OX, OY |
м |
- Rlmax... +RLmax |
|
|
. . . . . . |
|
|
|
2*i+7, 2*i+8 |
начальные координаты i-й точки контактной линии по осям OX, OY ( i =1,N+1, где N - количество отрезков ломаной) |
м |
- Rlmax... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
2*i-1 |
нормальная реакция, действующая на i-й отрезок ломаной со стороны точки С |
Н |
|
|
2*i |
сила трения, действующая на i-й отрезок ломаной со стороны точки С ( i =1,N, где N - количество отрезков) |
Н |
|
|
3 |
Скорость скольжения точки С по линии контакта |
м/сек |
|
Примечания:
1) выводится реакция (нормальная и сила трения), действующая на контактный участок со стороны точки C, и скорость скольжения точки C по линии контакта;
2) за положительные направления для элементов рабочего вектора принимаются направления осей локальной системы координат, связанной с пятном контакта. Положительное направление оси X локальной системы координат совпадает с направлением обхода контактного участка. Ось Y направлена внутрь контактной области (если элемент односторонний);
3) при отсутствии контакта в текущий момент времени все элементы рабочего вектора обнуляются.
6.2.1.3. Элемент, описывающий контактное взаимодействие эллипса с плоской линией, контур которой состоит из последовательности N отрезков KN2EL
Отображаемые свойства
|
|
|
|
Рис. KN2EL_1. |
Геометрические параметры и степени свободы контактного элемента «эллипс с ломаной»: Xo, Yo – начальные координаты центра эллипса (точка О); Xe, Ye – координаты точки, определяющей начальное положение первой главной оси эллипса (точка E); H – величина оси эллипса, направление которой определяется точками O и E; B – величина второй оси эллипса; Xp, Yp – начальные координаты точки, с движением которой связано движение контактного контура (точка P); Xi, Yi – начальные координаты i-ой точки контактного контура; 1, 2, 3 – перемещения и поворот центра эллипса; 4, 5, 6 – перемещения точки, с которой связан контактный участок. |
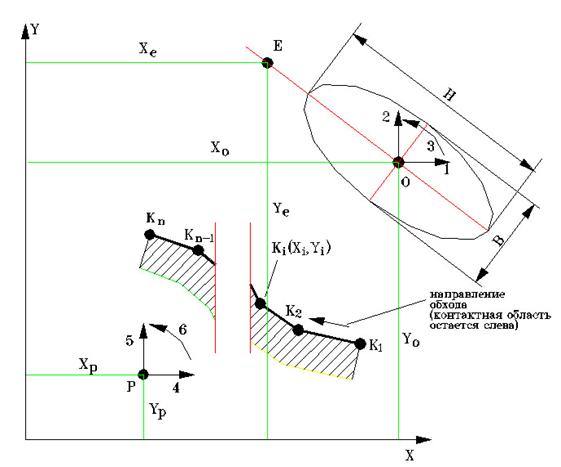
Контактное взаимодействие эллипса, движущегося в плоскости, и некоторого плоского тела, граница которого представляется совокупностью N отрезков. Движение контактной границы определяется перемещением жестко связанной с ним точки P, имеющей две степени свободы поступательного перемещения и одну степень свободы вращательного движения. При описании линии контакта координаты отрезков задаются в такой последовательности, чтобы при движении вдоль линии контакта контактная область оставалась слева. Контактный участок должен состоять как минимум из одного отрезка. Начальное положение эллипса определяется начальными координатами центра и вспомогательной точки E, которая располагается на большой оси эллипса. Его движение описывается тремя степенями свободы, связанными с его центром (рис.KN2EL_1).
При возникновении контакта сила контактного взаимодействия имеет нормальную и касательную составляющие. Нормальная составляющая определяется контактными зависимостями Герца (контакт плоскости с цилиндром). При этом жесткость элемента определяется как приведенным модулем упругости контактирующих тел, так и толщиной элемента, т.е., размером элемента в направлении, перпендикулярном плоскости движения. Касательная составляющая моделирует сухое трение скольжения в пятне контакта.
Степени свободы
|
1 - |
поступательная точки O по оси OX; |
|
2 - |
поступательная точки O по оси OY; |
|
5 - |
вращательная точки O; |
|
4 - |
поступательная точки P по оси OX; |
|
5 - |
поступательная точки P по оси OY; |
|
6 - |
вращательная точки P. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2 |
начальные координаты точки O по осям OX, OY |
м |
- Rlmax... +RLmax |
|
3,4 |
начальные координаты точки E по осям OX, OY |
м |
- Rlmax... +RLmax |
|
5,6 |
Длины первой и второй осей эллипса (H и B) |
м |
0 ... +RLmax |
|
7 |
толщина контактной области |
м |
0 ... +RLmax |
|
8 |
Приведенный модуль упругости контактирующих тел |
|
0 ... +RLmax |
|
9 |
коэффициент трения скольжения |
|
0 ... +RLmax |
|
10,11 |
Начальные координаты точки Р по осям OX, OY |
м |
- Rlmax... +RLmax |
|
12,13 |
начальные координаты 1-й точки контактной линии по осям OX, OY |
м |
- Rlmax... +RLmax |
|
|
. . . . . |
|
|
|
2*i+10 2*i+11 |
начальные координаты i-й точки контактной линии по осям OX, OY ( i =1,N+1, где N - количество отрезков) |
м |
- Rlmax... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
2*i-1 |
нормальная реакция в пятне контакта, действующая на i-й отрезок ломаной со строны эллипса |
Н |
|
|
2*i |
сила трения, действующая в пятне контакта на i-й отрезок ломаной со стороны эллипса (i=1,N; N - количество отрезков ломаной) |
Н |
|
Примечания:
1. Выводится реакция (нормальная и сила трения), действующая со стороны эллипса на контактный участок ломаной.
2. За положительные направления для элементов рабочего вектора принимаются направления осей локальной системы координат, связанной с пятном контакта. Положительное направление оси X’ локальной системы координат совпадает с направлением обхода контактного участка. Ось Y’ направлена внутрь контактной области (если элемент односторонний).
3. При отсутствии контакта в текущий момент времени все элементы рабочего вектора обнуляются.
6.3. Трехмерные элементы
6.3.1.1. Элемент, описывающий контактное взаимодействие цилиндра с точкой KNCLT
Отображаемые свойства
Контактное взаимодействие цилиндра и точки, совершающих произвольное движение в пространстве (рис.KNCLT_1).Точка, с которой отслеживается контакт цилиндра, обозначена точкой C. Пространственная ориентация оси цилиндра задается двумя точками: O и P (рис.KNCLT_1.а.). Положение цилиндрического участка возможного контакта вдоль оси OP задается постоянным смещением нижней кромки цилиндра относительно точки O. Смещение считается положительным, если оно направлено от O к P.
Элемент может быть использован для описания контакта двух типов (рис.KNCLT_1.б.) - внешнего (когда цилиндр - поверхность вала) и внутреннего (когда цилиндр - поверхность отверстия).
Если задана ненулевая величина коэффициента трения, то учитывается сила трения, действующая в контакте вдоль образующей цилиндра. Элемент не учитывает возможные вращения цилиндра вокруг своей оси и, соответственно, составляющую силы трения, действующую в поперечной (перпендикулярной оси цилиндра) плоскости.
Степени свободы
|
1, 2, 3 - |
поступательные точки C по осям X, Y, Z; |
|
4, 5, 6 - |
поступательные точки O по осям X, Y, Z; |
|
7, 8, 9 - |
поступательные точки P по осям X, Y, Z. |
|
|
|
|
Рис. KNCLT_1. |
Контактный элемент «цилиндр-точка». Положение оси цилиндра в пространстве определяется точками O и P. а) геометрические параметры и степени свободы: Xс, Yс, Zc – начальные координаты точки С; Xо, Yо, Zо – начальные координаты точки О; Xp, Yp, Zp – начальные координаты точки P; R – радиус контактного цилиндра; Lц – расстояние от точки О до кромки цилиндра; Lк – длина контактной поверхности; 1, 2, 3 – степени свободы точки С; 4, 5, 6 – степени свободы точки O; 7, 8, 9 – степени свободы точки P; б) использование элемента для описания внешнего и внутреннего контакта. |
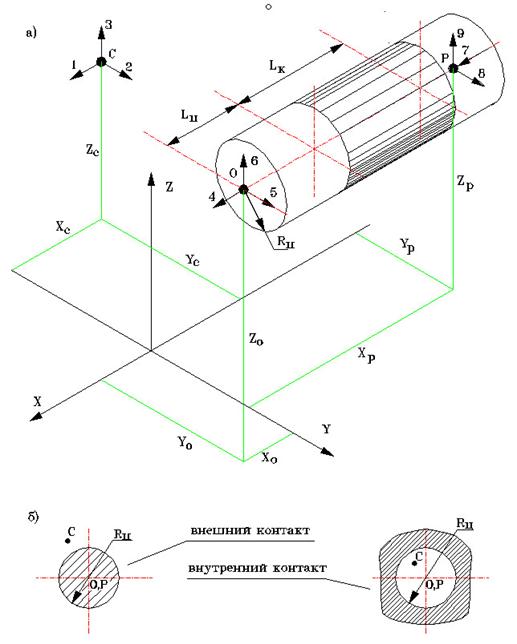
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки C по осям OX, OY, OZ |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки O по осям OX, OY,OZ |
м |
- Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки P по осям OX, OY,OZ |
м |
- Rlmax... +RLmax |
|
10 |
радиус цилиндрической поверхности |
м |
0 ... +RLmax |
|
11 |
длина цилиндрического участка контакта (Lк) |
м |
0 ... +RLmax |
|
12 |
осевое смещение кромки контактного цилиндра относительно точки O |
м |
0 ... +RLmax |
|
13 |
нормальная жесткость контакта |
Н/м |
0 ... +RLmax |
|
14 |
коэффициент трения скольжения |
|
0 ... +RLmax |
|
15 |
тип контакта: внешний(>=0); внутренний (<0) |
|
- Rlmax... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
нормальное усилие на цилиндр в точке контакта |
Н |
|
|
2 |
сила трения, действующая на цилиндр в точке контакта |
Н |
|
|
3 |
скорость движения точки C относительно цилиндра в контакте |
м/сек |
|
Примечания:
1. Осевое перемещение цилиндра связано с перемещением точки O и не связано с перемещением точки P;
2. Трение покоя не учитывается;
3. Возможен учет только трения скольжения и только вдоль образующей цилиндра;
4. Если в начальном состоянии или в процессе расчета точки C, O, P окажутся на одной прямой - усилия контакта будет нулевым;
5. Элементы рабочего вектора заполняются только при наличии контакта, в противном случае они инициализируются нулями. Знаки элементов рабочего вектора определяются знаком проекциях на оси такой локальной системы координат OX'Y', в которой ось OX' направлена по оси цилиндра от т.O к т.P, а ось OY' - перпендикулярно оси цилиндра в плоскости OPC, в сторону расположения точки C;
6. При отсутствии контакта модель осуществляет прогноз величины шага по условию возможного вступления в контакт на следующем шаге.
6.3.1.2. Элемент, описывающий контактное взаимодействие сферы с точкой KNSFT
Отображаемые свойства
Контактное взаимодействие сферы и точки, совершающих произвольное движение в пространстве (рис.KNSFT_1). Точка, с которой отслеживается контакт сферы, обозначена точкой C. Центр сферы - точка O (рис.KNCLT_1.а.)
Элемент может быть использован для описания контакта двух типов (рис.KNSFT_1.б.) - внешнего (когда сфера - поверхность шара) и внутреннего (когда сфера - поверхность сферической полости).
Элемент не учитывает возможные вращения сферы и силу трения, действующую в пятне контакта.
Степени свободы
|
1, 2, 3 - |
поступательные точки C, с которой отслеживается контакт сферы, по осям X, Y, Z; |
|
4, 5, 6 - |
поступательные центра сферы (точки O) по осям X, Y, Z. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки C по осям OX, OY, OZ |
м |
- Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки O по осям OX, OY,OZ |
м |
- Rlmax... +RLmax |
|
7 |
радиус сферы |
м |
0 ... +RLmax |
|
8 |
нормальная жесткость контакта |
Н/м |
0 ... +RLmax |
|
9 |
тип контакта: внешний(>=0); внутрений(<=0) |
|
- Rlmax... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
нормальное усилие, действующее на точку С в месте контакта со сферой |
Н |
|
|
2 |
"проникновение" точки C внутрь контактной области (величина контактной деформации) |
|
|
|
3 |
текущее расстояние между точками O и C |
м |
|
Примечания:
1. Знаки 1-го и 2-го элементов рабочего вектора соответствуют знакам проекций на ось, направленную по радиусу от центра сферы к точке контакта;
2. Если в начальном состоянии или в процессе расчета точки C и O совпадут - усилия контакта в этот момент не будет;
3. При отсутствии контакта модель осуществляет прогноз величины шага по условию возможного контакта на следующем шаге.
|
|
|
|
Рис. KNSFT_1. |
Контактный элемент «сфера с точкой». а) геометрические параметры и степени свободы: Xс, Yс, Zc – начальные координаты точки С; Xо, Yо, Zо – начальные координаты точки О; R – радиус контактной сферы; 1, 2, 3 – степени свободы точки С; 4, 5, 6 – степени свободы точки O; б) использование элемента для описания внешнего и внутреннего контакта. |
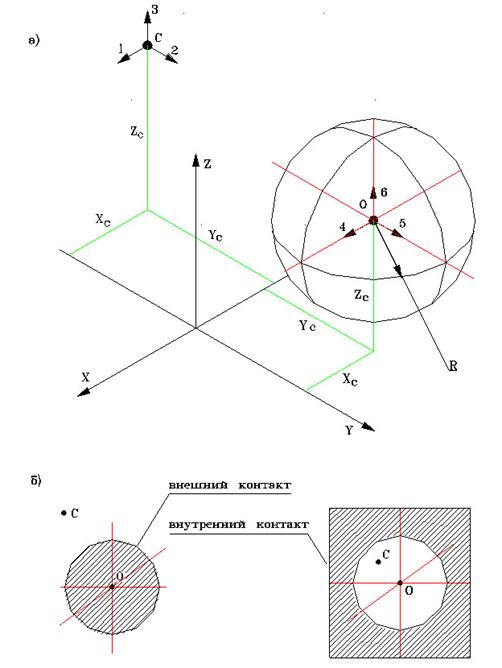
6.3.1.3. Элемент, описывающий контактное взаимодействие точки с фрагментом плоскости, имеющим форму параллелограмма KN3TP
Отображаемые свойства
Контактное взаимодействие точки, движущейся в пространстве, и плоского тела, имеющего форму параллелограмма. Положения точки T1 и тела T2 определяются соответствующими потенциальными переменными: три поступательные степени свободы определяют положение точки, три поступательные и три вращательные — положение фрагмента плоскости.
Начальное положение тел задаётся параметрами: для точки указываются её начальные координаты (координаты точки A1); для фрагмента плоскости указываются начальные координаты точек A2, B2, C2 и D2 (точки B2, C2, D2 также определяют форму параллелограмма). Полюс вращения фрагмента плоскости — это точка A2 (рис. KN3TP.1).
|
|
|
|
Рис. KN3TP_1. |
Параметры и степени свободы контактного элемента точка – фрагмент плоскости: Параметры: XA1, YA1, ZA1 – начальные координаты точки A1 XA2, YA2, ZA2 – начальные координаты точки A2 XB2, YB2, ZB2 – начальные координаты точки B2 XC2, YC2, ZC2 – начальные координаты точки C2 XD2, YD2, ZD2 – начальные координаты точки D2 Степени свободы: 1, 2, 3 – поступательные точки A1 по осям X, Y, Z 4, 5, 6 – поступательные точки A2 по осям X, Y, Z 7, 8, 9 – вращательные тела T2 вокруг осей X, Y, Z |
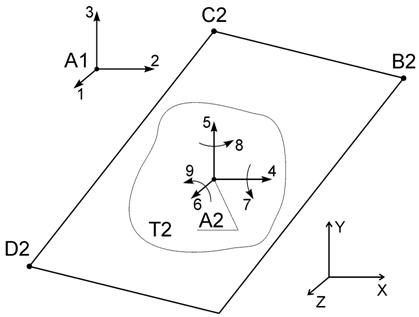
При возникновении контакта сила контактного взаимодействия имеет нормальную и касательную составляющие. Величины этих сил определяются контактной деформацией и скоростью точки относительно фрагмента плоскости, а также выбранной моделью описания сил контактного взаимодействия и набором параметров. Подробнее см. в разд. 6.4 (модели описания сил контактного взаимодействия). Контактная деформация определяется как глубина проникновения точки в полупространство, ограниченное фрагментом плоскости.
Степени свободы
|
1, 2, 3 - |
поступательные точки A1 по осям X, Y, Z; |
|
4, 5, 6 - |
поступательные точки A2 по осям X, Y, Z; |
|
7, 8, 9 - |
вращательные тела T2 по осям X, Y, Z; |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки A1 |
м |
– Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки A2 |
м |
– Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки B2 |
м |
– Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки C2 |
м |
– Rlmax... +RLmax |
|
13,14,15 |
начальные координаты точки D2 |
м |
– Rlmax... +RLmax |
|
16,… |
Параметры модели сил |
|
|
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Признак наличия контакта (0 – нет, 1 – есть) |
|
0 или 1 |
|
2 |
Величина контактной деформации |
м |
|
|
3 |
Проекция относительной скорости на нормаль |
м/сек |
|
|
4 |
Модуль проекции относительной скорости на плоскость плоского фрагмента |
м/сек |
|
|
5 |
Сила нормальной реакции в точке контакта |
Н |
|
|
6 |
сила трения в точке контакта (модуль) |
Н |
|
Примечания:
1) Считается, что нормаль к плоскости направлена в ту сторону, с которой находилась точка до начала контакта.
2) при отсутствии контакта в текущий момент времени все элементы рабочего вектора обнуляются.
6.3.1.4. Элемент, описывающий контактное взаимодействие эллипсоида с фрагментом плоскости, имеющим форму параллелограмма KN3EP
Отображаемые свойства
Контактное взаимодействие двух поверхностей, жестко связанных с абсолютно
твердыми телами T1 и T2.
Контактная поверхность первого тела представляет собой трёхосный эллипсоид,
или, более точно — поверхность степени ![]() , описываемую в
каноническом (главном) базисе уравнением
, описываемую в
каноническом (главном) базисе уравнением

(![]() — координаты
относительно главного базиса,
— координаты
относительно главного базиса, ![]() — полуоси).
Контактная поверхность второго тела считается фрагментом плоскости, имеющим
форму параллелограмма. Положения тел T1 и T2 определяются соответствующими потенциальными переменными:
три поступательные и три вращательные степени свободы определяют положение
каждого из тел.
— полуоси).
Контактная поверхность второго тела считается фрагментом плоскости, имеющим
форму параллелограмма. Положения тел T1 и T2 определяются соответствующими потенциальными переменными:
три поступательные и три вращательные степени свободы определяют положение
каждого из тел.
Начальное положение контактных поверхностей, а также полюсов вращения тел, задаётся параметрами (рис. KN3EP.1, 2): для тела T1 указываются начальные координаты точек A1 (полюс вращения тела T1), B1 (центр эллипсоида), C1 (точка, лежащая на третьей главной оси эллипсоида), D1 (точка, лежащая в плоскости первой и третьей главных осей); для фрагмента плоскости указываются начальные координаты точек A2 (полюс вращения тела T2), B2, C2 и D2 (точки B2, C2, D2 определяют форму параллелограмма). Форма эллипсоида определяется заданием трёх его полуосей и степени.
|
|
|
|
Рис. KN3EP_1. |
Параметры пространственной ориентации эллипсоида в контактном элементе эллипсоид – фрагмент плоскости: XB1, YB1, ZB1 – начальные координаты точки B1 (центра эллипсоида)XC1, YC1, ZC1 – начальные координаты точки C1 (эта точка лежит на оси Z’ ЛСК эллипсоида) XD1, YD1, ZD1 – начальные координаты точки D1 (эта точка лежит в плоскости X’Z’ ЛСК эллипсоида) |
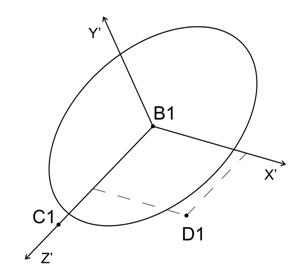
|
|
|
|
Рис. KN3EP_2. |
Параметры и степени свободы контактного элемента эллипсоид – фрагмент плоскости: Параметры: XA1, YA1, ZA1 – начальные координаты точки A1 (полюса вращения тела T1) R1, R2, R3 – полуоси эллипсоида P – степень эллипсоида XA2, YA2, ZA2 – начальные координаты точки A2 XB2, YB2, ZB2 – начальные координаты точки B2 XC2, YC2, ZC2 – начальные координаты точки C2 XD2, YD2, ZD2 – начальные координаты точки D2 степени свободы: 1, 2, 3 – поступательные точки A1 по осям X, Y, Z 4, 5, 6 – вращательные тела T1 вокруг осей X, Y, Z 7, 8, 9 – поступательные точки A2 по осям X, Y, Z 10, 11, 12 – вращательные тела T2 вокруг осей X, Y, Z
|
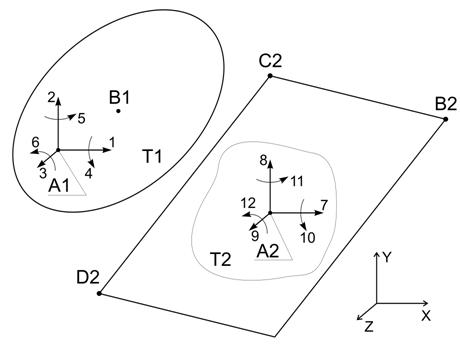
При возникновении контакта сила контактного взаимодействия имеет нормальную и касательную составляющие. Величины этих сил определяются нормальной контактной деформацией и относительной скоростью тел в точке контакта, а также выбранной моделью описания сил контактного взаимодействия и набором параметров. Подробнее см. в разд. 6.4 (модели описания сил контактного взаимодействия). Нормальная контактная деформация определяется как наибольшая глубина проникновения поверхности эллипсоида в полупространство, ограниченное фрагментом плоскости, если контакт происходит не на границе параллелограмма. При контакте с границей параллелограмма определение контактной деформации более сложное, но смысл сохраняется (подробности см. в описании математической модели).
Степени свободы
|
1, 2, 3 - |
поступательные точки A1 по осям X, Y, Z; |
|
4, 5, 6 - |
вращательные тела T1 по осям X, Y, Z; |
|
7, 8, 9 - |
поступательные точки A2 по осям X, Y, Z; |
|
10, 11, 12 - |
вращательные тела T2 по осям X, Y, Z; |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки A1 |
м |
– Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки B1 |
м |
– Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки C1 |
м |
– Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки D1 |
м |
– Rlmax... +RLmax |
|
13,14,15 |
Полуоси R1, R2, R3 |
м |
Rlmin... RLmax |
|
16 |
Степень эллипсоида, P |
м |
>1 |
|
17,18,19 |
начальные координаты точки A2 |
м |
– Rlmax... +RLmax |
|
20,21,22 |
начальные координаты точки B2 |
м |
– Rlmax... +RLmax |
|
23,24,25 |
начальные координаты точки C2 |
м |
– Rlmax... +RLmax |
|
26,27,28 |
начальные координаты точки D2 |
м |
– Rlmax... +RLmax |
|
29,… |
Параметры модели сил |
|
|
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Признак наличия контакта (0 – нет, 1 – есть) |
|
0 или 1 |
|
2 |
Величина контактной деформации |
м |
|
|
3 |
Проекция относительной скорости на нормаль |
м/сек |
|
|
4 |
Модуль тангенциальной составляющей относительной скорости |
м/сек |
|
|
5 |
Сила нормальной реакции в точке контакта |
Н |
|
|
6 |
сила касательной реакции в точке контакта (модуль) |
Н |
|
Примечания:
1) Считается, что нормаль направлена от тела T1 к телу T2. При нахождении точки контакта внутри параллелограмма нормаль перпендикулярна и плоскости, и поверхности эллипсоида; при нахождении точки контакта на границе параллелограмма, но внутри его стороны, нормаль перпендикулярна этой стороне и поверхности эллипсоида; при нахождении точки контакта в вершине параллелограмма нормаль перпендикулярна поверхности эллипсоида.
2) при отсутствии контакта в текущий момент времени все элементы рабочего вектора обнуляются.
3) Использование в KN3EP для тела T1 контактных поверхностей любой степени, отличной от двойки, требует более трудоёмких вычислительных операций.
4) При использовании поверхностей степени выше двойки необходимо иметь в виду, что некоторые элементы якобиана потоковых переменных могут обращается в бесконечность, если точка контакта оказывается на одной из координатных плоскостей системы координат, связанных с эллипсоидом.
6.3.1.5. Элемент, описывающий контактное взаимодействие эллипсоида с эллипсоидом KN3EE
Отображаемые свойства
Контактное взаимодействие двух поверхностей, жестко связанных с абсолютно
твердыми телами T1 и T2. Каждая
контактная поверхность представляет собой трёхосный эллипсоид, или, более точно
— поверхность степени ![]() (
(![]() ),
описываемую в каноническом (главном) базисе уравнением
),
описываемую в каноническом (главном) базисе уравнением
 ,
, ![]()
(![]() — координаты
относительно главного базиса i-го эллипсоида,
— координаты
относительно главного базиса i-го эллипсоида, ![]() —
полуоси i-го эллипсоида). Положения тел T1 и T2 определяются соответствующими
потенциальными переменными: три поступательные и три вращательные степени
свободы определяют положение каждого из тел.
—
полуоси i-го эллипсоида). Положения тел T1 и T2 определяются соответствующими
потенциальными переменными: три поступательные и три вращательные степени
свободы определяют положение каждого из тел.
Начальное положение контактных поверхностей, а также полюсов вращения тел, задаётся параметрами (рис. KN3EE.1, 2): для тела T1 указываются начальные координаты точек A1 (полюс вращения тела T1), B1 (центр эллипсоида), C1 (точка, лежащая на третьей главной оси эллипсоида), D1 (точка, лежащая в плоскости первой и третьей главных осей); для тела T2 указываются аналогичные величины — координаты точек A2, B2, C2, D2.
|
|
|
|
Рис. KN3EE_1. |
Параметры пространственной ориентации эллипсоидов в контактном элементе эллипсоид – эллипсоид: XB1, YB1, ZB1 – начальные координаты точки B1 (центра первого эллипсоида) XC1, YC1, ZC1 – начальные координаты точки C1 (эта точка лежит на оси Z1’ ЛСК первого эллипсоида) XD1, YD1, ZD1 – начальные координаты точки D1 (эта точка лежит в плоскости X1’Z1’ ЛСК первого эллипсоида) XB2, YB2, ZB2 – начальные координаты точки B2 (центра второго эллипсоида) XC2, YC2, ZC2 – начальные координаты точки C2 (эта точка лежит на оси Z2’ ЛСК второго эллипсоида) XD2, YD2, ZD2 – начальные координаты точки D2 (эта точка лежит в плоскости X2’Z2’ ЛСК второго эллипсоида) |
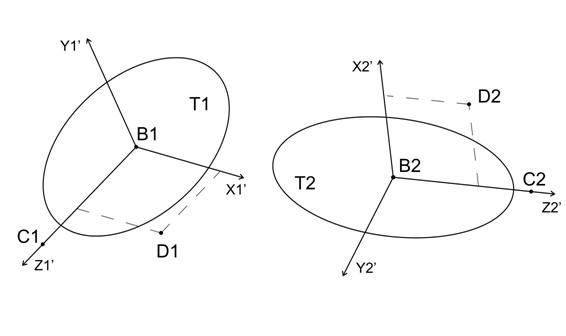
При возникновении контакта сила контактного взаимодействия имеет нормальную и касательную составляющие. Величины этих сил определяются нормальной контактной деформацией и относительной скоростью тел в точке контакта, а также выбранной моделью описания сил контактного взаимодействия и набором параметров. Подробнее см. в разд. 6.4 (модели описания сил контактного взаимодействия). Нормальная контактная деформация определяется как наибольшая глубина взаимопроникновения эллипсоидов.
|
|
|
|
Рис. KN3EE_2. |
Параметры и степени свободы контактного элемента эллипсоид – эллипсоид: Параметры: XA1, YA1, ZA1 – начальные координаты точки A1 (полюса вращения тела T1) R11, R12, R13 – полуоси первого эллипсоида P1 – степень первого эллипсоида XA2, YA2, ZA2 – начальные координаты точки A2 (полюса вращения тела T2) R21, R22, R23 – полуоси второго эллипсоида P2 – степень второго эллипсоида Степени свободы: 1, 2, 3 – поступательные точки A1 по осям X, Y, Z 4, 5, 6 – вращательные тела T1 вокруг осей X, Y, Z 7, 8, 9 – поступательные точки A2 по осям X, Y, Z 10, 11, 12 – вращательные тела T2 вокруг осей X, Y, Z |
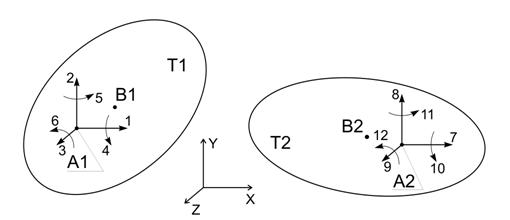
Степени свободы
|
1, 2, 3 - |
поступательные точки A1 по осям X, Y, Z; |
|
4, 5, 6 - |
вращательные тела T1 по осям X, Y, Z; |
|
7, 8, 9 - |
поступательные точки A2 по осям X, Y, Z; |
|
10, 11, 12 - |
вращательные тела T2 по осям X, Y, Z; |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки A1 |
м |
– Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки B1 |
м |
– Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки C1 |
м |
– Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки D1 |
м |
– Rlmax... +RLmax |
|
13,14,15 |
Полуоси R11, R12, R13 |
м |
Rlmin... RLmax |
|
16 |
Степень первого эллипсоида, P1 |
м |
>1 |
|
17,18,19 |
начальные координаты точки A2 |
м |
– Rlmax... +RLmax |
|
20,21,22 |
начальные координаты точки B2 |
м |
– Rlmax... +RLmax |
|
23,24,25 |
начальные координаты точки C2 |
м |
– Rlmax... +RLmax |
|
26,27,28 |
начальные координаты точки D2 |
м |
– Rlmax... +RLmax |
|
29,30,31 |
Полуоси R21, R22, R23 |
м |
Rlmin... RLmax |
|
32 |
Степень второго эллипсоида, P2 |
м |
>1 |
|
33,… |
Параметры модели сил |
|
|
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Признак наличия контакта (0 – нет, 1 – есть) |
|
0 или 1 |
|
2 |
Величина контактной деформации |
м |
|
|
3 |
Проекция относительной скорости на нормаль |
м/сек |
|
|
4 |
Модуль тангенциальной составляющей относительной скорости |
м/сек |
|
|
5 |
Сила нормальной реакции в точке контакта |
Н |
|
|
6 |
сила касательной реакции в точке контакта (модуль) |
Н |
|
Примечания:
1) Считается, что нормаль направлена от тела T1 к телу T2.
2) при отсутствии контакта в текущий момент времени все элементы рабочего вектора обнуляются.
3) В настоящей версии элемента KN3EE для тела T1 необходимо, чтобы степени контактных поверхностей P1 и P2 не превышали двойки; в противном случае алгоритм поиска точки контакта работает нестабильно. В следующей версии элемента эта проблема будет решена.
6.3.1.6. Элемент, описывающий контактное взаимодействие двух фасетных поверхностей KN3FF
Отображаемые свойства
Контактное взаимодействие двух фасетных поверхностей, M1 и M2, жестко связанных с абсолютно твердыми телами T1 и T2. Каждая контактная поверхность задается сеткой, состоящей из треугольных граней. При задании сетки отдельно указываются координаты узлов, и отдельно — тройки номеров узлов, определяющие грани сетки (при этом номер первого узла считается равным единице). Положения тел T1 и T2 определяются соответствующими потенциальными переменными: три поступательные и три вращательные степени свободы определяют положение каждого из тел.
Начальное положение контактных поверхностей, а также полюсов вращения тел, задаётся параметрами (рис. KN3FF.1): для тела T1 указываются начальные координаты точек A1 (полюс вращения тела T1), B1 (начало ЛСК, в которой задана фасетная поверхность), C1 (точка, лежащая на оси O’Z’ ЛСК), D1 (точка, лежащая в плоскости X’O’Z’ ЛСК, но не на оси O’Z’); для тела T2 указываются аналогичные величины — координаты точек A2, B2, C2, D2.
|
|
|
|
Рис. KN3FF_1. |
Степени свободы и параметры пространственной ориентации в контактном элементе фасетка – фасетка |
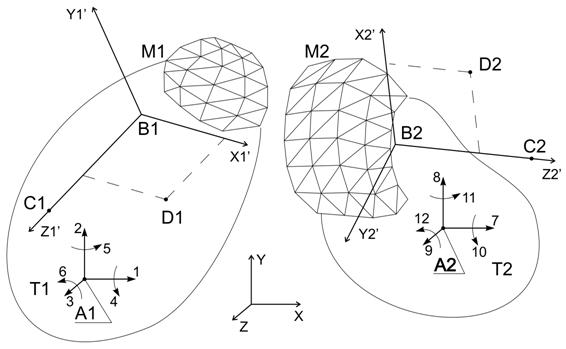
При возникновении контакта сила контактного взаимодействия имеет нормальную и касательную составляющие. Величины этих сил определяются нормальной контактной деформацией и относительной скоростью тел в точке контакта, а также выбранной моделью описания сил контактного взаимодействия и набором параметров. Подробнее см. в разд. 6.4 (модели описания сил контактного взаимодействия). Нормальная контактная деформация определяется как наибольшая глубина взаимопроникновения поверхностей. Точек контакта может быть несколько, но не более 20.
Степени свободы
|
1, 2, 3 - |
поступательные точки A1 по осям X, Y, Z; |
|
4, 5, 6 - |
вращательные тела T1 по осям X, Y, Z; |
|
7, 8, 9 - |
поступательные точки A2 по осям X, Y, Z; |
|
10, 11, 12 - |
вращательные тела T2 по осям X, Y, Z; |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 … n1 |
Параметры геометрии поверхности, связанной с телом T1 |
|
|
|
n1+1 … n1+n2 |
Параметры геометрии поверхности, связанной с телом T2 |
|
|
|
n1+n2+1 … |
Параметры модели сил |
|
|
Первые два блока в этой таблице имеют одну и ту же структуру и состоят из n1 и n2 параметров соответственно; эта структура описана в следующей таблице (в ней номер параметра отсчитывается относительно начала блока). Третий блок — описание модели силового взаимодействия, стандартное для всех элементов KN3XX (см. разд. 6.4).
Параметры геометрии поверхности, связанной с телом T(i) (i =1,2)
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки A(i) |
|
– Rlmax... +RLmax |
|
4,5,6 |
Начальные координаты точки B(i) |
|
– Rlmax... +RLmax |
|
7,8,9 |
Начальные координаты точки C(i) |
|
– Rlmax... +RLmax |
|
10,11,12 |
Начальные координаты точки D(i) |
|
– Rlmax... +RLmax |
|
13 |
Количество узлов сетки M(i) (nr(i)) |
|
|
|
14 |
Количество граней сетки M(i) (nf(i)) |
|
|
|
15 … 14+3*nr(i) |
Координаты узлов сетки M(i) |
м |
– Rlmax... +RLmax |
|
15+3*nr(i) … |
Обходы граней сетки M(i) (тройки номеров узлов, соответствующих граням; 1-й узел имеет номер 1) |
|
1 … nr(i) |
Замечание. Фасетная поверхность должна удовлетворять следующим требованиям алгебраического характера:
· связность: от любой грани можно перейти к любой другой, пересекая ребра;
· «простота поверхности»: каждое ребро принадлежит не более чем двум граням;
· согласованная ориентация граней: общее ребро двух граней обходится в описаниях этих граней в разных направлениях;
· односвязность: допускается не более одной связной компоненты границы (линии, состоящей из ребер, каждая из которых принадлежит лишь одной грани);
· «простота границы»: каждый узел границы принадлежит ровно двум ребрам границы.
Кроме того, в сетке не должно быть ребер нулевой длины.
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Количество точек контакта |
|
0 … 20 |
|
2-12 |
Информация по 1-й точке контакта |
|
|
|
13-23 |
Информация по 2-й точке контакта |
|
|
|
… |
… |
|
|
|
211-221 |
Информация по 20-й точке контакта |
|
|
Здесь блок информации о каждой из точек контакта содержит следующие величины.
Блок информации по точке контакта
|
1,2,3 |
Радиус-вектор точки контакта |
м |
|
|
4,5,6 |
Нормаль в точке контакта |
|
|
|
7 |
Величина контактной деформации |
м |
|
|
8 |
Проекция относительной скорости на нормаль |
м/сек |
|
|
9 |
Модуль тангенциальной составляющей относительной скорости |
м/сек |
|
|
10 |
Сила нормальной реакции в точке контакта |
Н |
|
|
11 |
сила касательной реакции в точке контакта (модуль) |
Н |
|
Примечания:
TODO
6.3.1.7. Элемент, описывающий контактное взаимодействие эллипсоида с фасетной поверхностью KN3EF
Отображаемые свойства
Контактное взаимодействие эллипсоида и фасетной поверхности, жестко связанных с абсолютно твердыми телами T1 и T2. Положения тел T1 и T2 определяются соответствующими потенциальными переменными: три поступательные и три вращательные степени свободы определяют положение каждого из тел.
С телом T1 связана поверхность «эллипсоида»
— поверхность степени ![]() , описываемую в
каноническом (главном) базисе уравнением
, описываемую в
каноническом (главном) базисе уравнением
(![]() — координаты
относительно главного базиса эллипсоида,
— координаты
относительно главного базиса эллипсоида, ![]() — полуоси
эллипсоида).
— полуоси
эллипсоида).
Вторая контактная поверхность задается сеткой M2, состоящей из треугольных граней. При задании сетки отдельно указываются координаты узлов, и отдельно — тройки номеров узлов, определяющие грани сетки (при этом номер первого узла считается равным единице).
Начальное положение контактных поверхностей, а также полюсов вращения тел, задаётся параметрами (рис. KN3EF.1). Для тела T1 указываются начальные координаты точек A1 (полюс вращения тела T1), B1 (центр эллипсоида), C1 (точка, лежащая на третьей главной оси эллипсоида), D1 (точка, лежащая в плоскости первой и третьей главных осей). Для тела T2 указываются аналогичные величины — координаты точек A2 (полюс вращения тела T2), B2 (начало ЛСК, в которой задана фасетная поверхность), C2 (точка, лежащая на оси O’Z’ ЛСК), D2 (точка, лежащая в плоскости X’O’Z’ ЛСК, но не на оси O’Z’).
|
|
|
|
Рис. KN3EF_1. |
Степени свободы и параметры пространственной ориентации в контактном элементе фасетка – фасетка. |
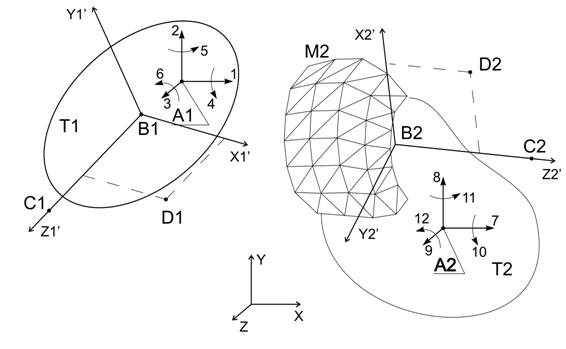
При возникновении контакта сила контактного взаимодействия имеет нормальную и касательную составляющие. Величины этих сил определяются нормальной контактной деформацией и относительной скоростью тел в точке контакта, а также выбранной моделью описания сил контактного взаимодействия и набором параметров. Подробнее см. в разд. 6.4 (модели описания сил контактного взаимодействия). Нормальная контактная деформация определяется как наибольшая глубина взаимопроникновения поверхностей. Точек контакта может быть несколько, но не более 20.
Степени свободы
|
1, 2, 3 - |
поступательные точки A1 по осям X, Y, Z; |
|
4, 5, 6 - |
вращательные тела T1 по осям X, Y, Z; |
|
7, 8, 9 - |
поступательные точки A2 по осям X, Y, Z; |
|
10, 11, 12 - |
вращательные тела T2 по осям X, Y, Z; |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 … n1 |
Параметры геометрии эллипсоида, связанного с телом T1 |
|
|
|
n1+1 … n1+n2 |
Параметры геометрии фасетной поверхности, связанной с телом T2 |
|
|
|
n1+n2+1 … |
Параметры модели сил |
|
|
Первый блок в этой таблице определяет геометрию эллипсоида; он состоит из n1=16 параметров, перечисленных в табл. «параметры эллипсоида». Второй блок n2 параметров, его структура описана в таблице «параметры фасетной поверхности» (в ней номер параметра отсчитывается относительно начала блока). Третий блок — описание модели силового взаимодействия, стандартное для всех элементов KN3XX (см. разд. 6.4).
Параметры эллипсоида
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
начальные координаты точки A1 |
м |
– Rlmax... +RLmax |
|
4,5,6 |
начальные координаты точки B1 |
м |
– Rlmax... +RLmax |
|
7,8,9 |
начальные координаты точки C1 |
м |
– Rlmax... +RLmax |
|
10,11,12 |
начальные координаты точки D1 |
м |
– Rlmax... +RLmax |
|
13,14,15 |
Полуоси R1, R2, R3 |
м |
Rlmin... RLmax |
|
16 |
Степень эллипсоида, p |
м |
>1 |
Параметры фасетной поверхности
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1,2,3 |
Начальные координаты точки A2 |
|
– Rlmax... +RLmax |
|
4,5,6 |
Начальные координаты точки B2 |
|
– Rlmax... +RLmax |
|
7,8,9 |
Начальные координаты точки C2 |
|
– Rlmax... +RLmax |
|
10,11,12 |
Начальные координаты точки D2 |
|
– Rlmax... +RLmax |
|
13 |
Количество узлов сетки M2 (nr2) |
|
|
|
14 |
Количество граней сетки M2 (nf2) |
|
|
|
15 … 14+3*nr2 |
Координаты узлов сетки M2 |
м |
– Rlmax... +RLmax |
|
15+3*nr2 … |
Обходы граней сетки M2 (тройки номеров узлов, соответствующих граням; 1-й узел имеет номер 1) |
|
1 … nr2 |
Замечание. Фасетная поверхность должна удовлетворять следующим требованиям алгебраического характера:
· связность: от любой грани можно перейти к любой другой, пересекая ребра;
· «простота поверхности»: каждое ребро принадлежит не более чем двум граням;
· согласованная ориентация граней: общее ребро двух граней обходится в описаниях этих граней в разных направлениях;
· односвязность: допускается не более одной связной компоненты границы (линии, состоящей из ребер, каждая из которых принадлежит лишь одной грани);
· «простота границы»: каждый узел границы принадлежит ровно двум ребрам границы.
Кроме того, в сетке не должно быть ребер нулевой длины.
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Количество точек контакта |
|
0 … 20 |
|
2-12 |
Информация по 1-й точке контакта |
|
|
|
13-23 |
Информация по 2-й точке контакта |
|
|
|
… |
… |
|
|
|
211-221 |
Информация по 20-й точке контакта |
|
|
Здесь блок информации о каждой из точек контакта содержит следующие величины.
Блок информации по точке контакта
|
1,2,3 |
Радиус-вектор точки контакта |
м |
|
|
4,5,6 |
Нормаль в точке контакта |
|
|
|
7 |
Величина контактной деформации |
м |
|
|
8 |
Проекция относительной скорости на нормаль |
м/сек |
|
|
9 |
Модуль тангенциальной составляющей относительной скорости |
м/сек |
|
|
10 |
Сила нормальной реакции в точке контакта |
Н |
|
|
11 |
сила касательной реакции в точке контакта (модуль) |
Н |
|
Примечания:
TODO
6.4. Приложение: модели сил контактного взаимодействия
Во всех трехмерных контактных элементах KN3?? силовое взаимодействие моделируется единообразно: одни и те же модели силового взаимодействия применимы к разным элементам. Поэтому описание моделей силового взаимодействия (или, коротко, моделей сил) собрано в этом отдельном разделе.
С каждым элементом KN3?? может быть связана одна или несколько моделей сил. Описание моделей сил в элементе следует за его основными параметрами. Описание каждой модели начинается с номера модели — её идентификатора; после идентификатора описываются значения параметров модели сил. Таких блоков, состоящих из идентификатора модели и следующих за ним параметров, может быть несколько (не менее одного и не более 12), в описании элемента они просто следуют друг за другом.
Перечислим модели сил, реализованные в настоящий момент.
1. Модель упругой нормальной силы, линейно зависящей от деформации
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Идентификатор (всегда 1) |
|
|
|
2 |
Контактная жесткость |
Н/м |
Rlmin... RLmax |
ЗАМЕЧАНИЯ:
Эта модель сил при описании элемента должна быть упомянута перед моделями касательных сил
2. Модель вязкой нормальной силы, линейно зависящей от скорости деформации
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Идентификатор (всегда 2) |
|
|
|
2 |
Контактная вязкость |
Н с/м |
0... RLmax |
3. Модель упругой нормальной силы, произвольно зависящей от деформации. Упругая характеристика должна быть определена параметрами модели.
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Идентификатор (всегда 3) |
|
|
|
2, ..., 2+2*N1 |
Упругая характеристика, определённая как кусочно-линейная зависимость силы от деформации; здесь N1 - число узлов в упругой характеристике. Необходимо задать не менее двух точек, причем первая точка должна быть (0,0). Характеристика задается в виде набора пар (x,f(x)), причем x должны строго возрастать; после последней точки характеристики должен идти завершающий нуль. |
м, Н |
x: 0... RLmax, |
ЗАМЕЧАНИЯ:
Эта модель сил при описании элемента должна быть упомянута перед моделями касательных сил.
4. Модель вязкой нормальной силы, произвольно зависящей от деформации. Вязкая характеристика должна быть определена параметрами модели.
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Идентификатор (всегда 4) |
|
|
|
2, ..., 2+2*N1 |
Вязкая характеристика, определённая как кусочно-линейная зависимость силы от скорости деформации; здесь N1 - число узлов в упругой характеристике. Необходимо задать не менее двух точек, причем первая точка должна быть (0,0). Характеристика задается в виде набора пар (x,f(x)), причем x должны строго возрастать; после последней точки характеристики должен идти завершающий нуль. |
м/с, Н |
x: 0... RLmax, |
5. Модель тангенциальной силы трения. Реализует силу трения, действующую в касательной плоскости в направлении, противоположном касательной проекции относительной скорости, по величине пропорциональную упругой составляющей нормальной реакции и коэффициенту трения; коэффициент трения, f, считается постоянным.
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Идентификатор (всегда 11) |
|
|
|
2 |
коэффициент сухого трения |
|
0... RLmax |
ЗАМЕЧАНИЯ:
Эта модель сил при описании элемента должна быть упомянута после моделей нормальных сил
6. Модель тангенциальной силы трения. Реализует силу трения, действующую в касательной плоскости в направлении, противоположном касательной проекции относительной скорости (VTR), по величине пропорциональную упругой составляющей нормальной реакции (QNE) и коэффициенту трения; коэффициент трения, f, в свою очередь, зависит от модуля VTR следующим образом: при |VTR| < v0 линейно меняется от 0 до f0; при |VTR| >= v0 постоянен и равен f0. f0 и v0 - параметры модели.
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Идентификатор (всегда 12) |
|
|
|
2 |
f0, предельное значение коэффициента трения |
|
0... RLmax |
|
3 |
v0, скорость, при которой коэффициента трения достигает f0 |
|
RLmin... RLmax |
ЗАМЕЧАНИЯ:
Эта модель сил при описании элемента должна быть упомянута после моделей нормальных сил
7. Модель тангенциальной силы трения. Реализует силу трения, действующую в касательной плоскости в направлении, противоположном касательной проекции относительной скорости (VTR), по величине пропорциональную модулю относительной скорости |VTR| и коэффициенту вязкого трения; коэффициент вязкого трения, b, считается постоянным.
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Идентификатор (всегда 13) |
|
|
|
2 |
коэффициент вязкого трения |
Н с/м |
0... RLmax |
7. Передачи
7.1. Одномерные элементы
7.1.1.1. Передача с потерями момента (силы) в зависимости от заданного к.п.д. REDCT
Отображаемые свойства
Служит для передачи движения между двумя степнями свободы с заданным значением передаточного отношения. Типичные случаи применения элемента изображены на рисунке REDCT_1.а. Как видно из этого рисунка, степени свободы связываемых элеметом тел могут быть как вращательными, так и поступательными. Связь между скоростями по этим степеням свободы задается зависимостью:
w1 + u * w2 = 0
, где u - заданное передаточное отношение;
w1 - скорость движения ведущего звена;
w2 - скорость движения ведомого звена.
Элемент не воспроизводит явления проскальзывания, которое может происходить в реальных передачах типа фрикционной или ременной. Потери в передаче определяются постоянным моментом трения (усилием трения), величина которого определяется заданным к.п.д. и номинальным моментом (номинальным усилием) передачи:
M тр = M ном * h
, где Mном - номинальный момент (усилие), приложенный к первой степени свободы;
h - к.п.д. передачи при номинальном моменте (усилии).
Поскольку величина момента (усилия) трения не зависит от нагрузки, характер изменения к.п.д. передачи в зависимости от приложенного к первой степени свободы момента (усилия) изменяется по закону, показанному на рис. REDCT_1.б.
Элемент не воспроизводит явления самоторможения (необратимости передачи), которое является характерным для таких реальных передач, как волновая, винтовая с соответствующим углом наклона винтовой линии и др.
|
|
|
|
REDCT_1 |
Модель передачи с потерями: а) типичные случаи применения элементы; б) зависимость коэффициента полезного действия от нагрузки. |
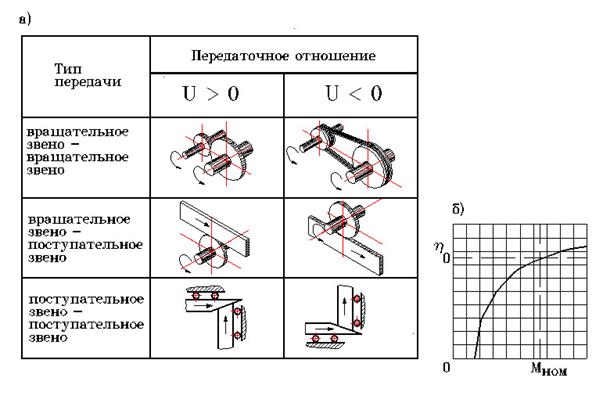
Степени свободы элемента
|
1 - |
вращательная (поступательная) первого тела; |
|
2 - |
вращательная (поступательная) второго тела. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
передаточное отношение |
|
- Rlmax... 0 [ ]0 ... +RLmax |
|
2 |
к.п.д. при номинальном моменте (усилии) |
м |
0 ...1 |
|
3 |
номинальный момент (усилие) для первой степени свободы |
Н*м или Н |
]0 ... +RLmax |
|
4 |
жесткость передачи, приведенная к входному звену (*) |
Н*м/рад или Н/м |
]0 ... +RLmax |
|
5 |
момент инерции (масса) по первой степени |
кг*м2 или кг |
]0 ... +RLmax |
|
6 |
момент инерции (масса) по второй степени свободы |
кг*м2 или кг |
]0 ... +RLmax |
*) Физический смысл этого параметра: величина деформации элемента по первой степени свободы под действием приложенного к нему единичного момента (усилия) при закрепленной второй степени свободы. Размерность параметра определяется тем, вращательной или поступательной является первая степень свободы элемента.
7.1.1.2. Дифференциал с постоянным моментом трения и жесткой кинематической связью между выходными полуосевыми шестернями DIFMC
Отображаемые свойства
Служит для распределения крутящего момента между входным и выходными звеньями и обеспечения их вращения с разными угловыми скоростями. Примеры кинематических схем дифференциалов приводятся на рис. DIFMC_1.
Если ведущее звено (корпус) вращается с угловой скоростью wд , а левая и правая полуосевые шестерни - с угловыми скоростями w1 и w2, то соотношение между угловыми скоростями wд , w1 и w2 задается выражением [20]:
w1 + uд * w2 = ( 1 + uд ) * wд
, где uд - внутреннее передаточное отношение дифференциала.
Внутреннее передаточное отношение дифференциала может быть определено как отношение количества зубьев на ведомых полуосевых шестернях:
uд = z2 / z1
На рис.DIFMC_1.а. приводится пример конструкции симметричного (uд = 1), а на рис.DIFMC_1.б. - несимметричного дифференциала.
Между выходными полуосями дифференциала действует момент трения. Его величина определяется по зависимости [19]:
M тр = K б * M ном
, где K б - коэффициент блокировки (0 ... 1);
Mном - номинальный момент дифференциала.
Если в какой-то момент времени одна из полуосей становится "забегающей", а какая-то "отстающей", то движущий момент перераспределяется между полуосями с учетом момента трения [20]. Если "забегающая" - первая полуось, то моменты M1 и M2 вычисляются по соотношениям :
M1 = (M д - M тр) / (1 + uд)
M2 = (uд * M д + M тр) / (1 + uд)
, если "забегающей" становится вторая полуось, то эти соотношения изменяются скачкообразно:
M1 = (M д + M тр) / (1 + uд)
M2 = (uд * M д - M тр) / (1 + uд)
, где M1, M2 - моменты на выходных полуосях;
M д - движущий момент.
|
|
|
|
DIFMC_1 |
Примеры конструктивных схем дифференциала и степени свободы модели элемента: 1 – угол поворота ведущего звена; 2, 3 – углы поворота первой и второй полуосевых шестерен; а) симметричный дифференциал; б) несимметричный дифференциал. |
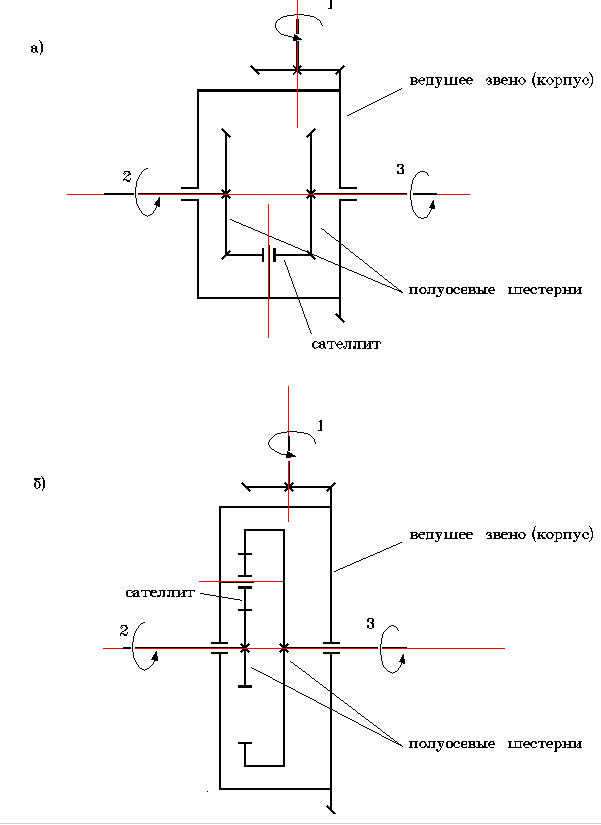
Степени свободы элемента
|
1 - |
вращательная входного звена; |
|
2 - |
вращательная первой полуосевой шестерни; |
|
3 - |
вращательная второй полуосевой шестерни. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
коэффициент блокировки |
|
0 ...1 |
|
2 |
внутреннее передаточное число |
|
]0 ... +RLmax |
|
3 |
номинальный входной момент |
Н*м или Н |
]0 ... +RLmax |
|
4 |
жесткость передачи, приведенная к входному звену (*) |
Н*м/рад или Н/м |
]0 ... +RLmax |
*) Физический смысл этого параметра : величина угловой деформации входного звена под действием приложенного к нему единичного момента при закрепленных полуосях.
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
текущая величина момента трения |
Н*м |
|
|
2 |
текущая величина коэффициента блокировки ( K = I ( M тр/ M вх.звена ) I) |
|
|
7.1.1.3. Фрикционная муфта включения MUFTA
Отображаемые свойства
Служит для передачи движения со входного на выходное звено за счет трения. Конструктивная схема типичной муфты включения приводится на рис. MUFTA_1.
В начальном состоянии муфта выключена (полумуфты разомкнуты). Внешнее усилие, воздействующее на нажимной элемент, вызывает его перемещение в осевом направлении. После преодоления зазора происходит смыкание полумуфт, что вызывает прижим фрикционных элементов и передачу крутящего момента между полумуфтами.
|
|
|
|
MUFTA_1 |
Примеры конструктивной схемы фрикционной муфты. Момент трения, развиваемый муфтой, определяется коэффициентом трения и приведенным диаметром фрикционных накладок Dпр. Δ – свободный ход нажимного элемента; δ – коэффициент приведения, зависящий от количества и формы поверхностей трения. |
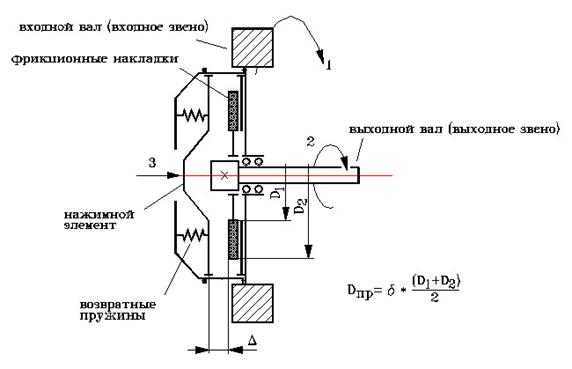
Максимальная величина передаваемого крутящего момента определяется выражением:
M max = m * D пр / 2 * N
, где m - коэффициент трения;
D пр - приведенный диаметр фрикционных накладок. Определяется как произведение среднего диаметра на коэффициент d, учитывающий количество и форму элементов трения. Для однодисковой муфты с двумя кольцевыми поверхностями трения d = 2;
N - усилие прижима фрикционных накладок.
Степени свободы
|
1 - |
вращательная первой полумуфты; |
|
2 - |
вращательная второй полумуфты; |
|
3 - |
поступательная нажимного элемента. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
жесткость возвратных пружин |
Н/м |
]0 ... +RLmax |
|
2 |
осевая контактная жесткость полумуфт |
Н/м |
]0 ... +RLmax |
|
3 |
сдвиговая контактная жесткость полумуфт |
Н*м/рад |
]0 ... +RLmax |
|
4 |
свободный ход нажимного элемента |
м |
0 ... +RLmax |
|
5 |
приведенный диаметр фрикционных накладок |
м |
]0 ... +RLmax |
|
6 |
момент инерции первой полумуфты |
кг*м2 |
0 ... +RLmax |
|
7 |
момент инерции второй полумуфты |
кг*м2 |
0 ... +RLmax |
|
8 |
масса нажимного элемента |
кг |
0 ... +RLmax |
Рабочий вектор
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
усилие прижима фрикционных дисков муфты |
Н |
|
|
2 |
усилие возвратных пружин |
Н |
|
8. СПЕЦИАЛЬНЫЕ ЭЛЕМЕНТЫ
8.1. Одномерные элементы
8.1.1. Измерительное оборудование
8.1.1.1. Одноканальный акселерометр со встроенным фильтром низкой частоты AKSEL
Отображаемые свойства
Служит для частотной фильтрации графика ускорения физической точки, полученного расчетным либо экспериментальным путем.
Внутренняя структура фильтра изображена на рис. AKSEL_1.а. Поступающий на вход фильтра сигнал проходит через колебательный контур k - m1 - m1. Назначение этого контура - обеспечить минимальные искажения сигнала в частотном диапазоне 0... Fh, где Fh - частота, численно равная классу фильтрации канала. После этого сигнал проходит через вязкостно-инерционный фильтр m2 - m2, обеспечивающий выполнение требований к фильтру на частотах, превышающих границу полосы пропускания Fn.
Модель элемента может быть использована для обработки результатов ударных испытаний и соответствует требованиям стандарта ISO 6487-80 ("Техника измерения в испытаниях на столкновение. Аппаратура.").
Статическая амплитудно-частотная характеристика фильтра изображена на рис.DAKSEL_1.б. На этом же рисунке заштрихована зона, допукаемая для АЧХ требованиями стандарта ISO 6487-80.
При прохождении сигнала через фильтр происходит его фазовый сдвиг. Требованиями стандарта ISO 6487-80 устанавливаются ограничения на разницу в сдвиге фаз между частотой 0.03 Fh и Fh. Она не должна превышать величины 1/(10Fh). Для четырех определенных этим стандартом классов фильтрации модель элемента дает следующие результаты по фазовому сдвигу на частотах 0.03Fh и Fh:
|
Класс частоты |
Сдвиг фаз (мс) |
Разница в сдвиге фаз (мс) |
||
|
канала |
частота 0.03Fh |
частота Fh |
расчет |
требование ISO 6487-80 |
|
60 |
3.48 |
3.52 |
0.04 |
1.67 |
|
180 |
1.16 |
1.18 |
0.02 |
0.56 |
|
600 |
0.34 |
0.36 |
0.02 |
0.17 |
|
1000 |
0.22 |
0.22 |
0.00 |
0.10 |
Степени свободы
|
1 - |
поступательная, ускорение которой замеряется; |
|
2 - |
поступательная чувствительного элемента акселерометра. |
Параметры
|
N п/п |
Описание |
Размерность |
Диапазон |
|
1 |
Класс частоты канала фильтрации Fh |
Герц |
0 ... +RLmax |
|
2 |
Граница полосы пропускания Fn |
Герц |
Fh ... +RLmax |
|
3 |
Начальная скорость датчика |
м/сек |
-RLmax... +RLmax |
Примечания:
1. Стандартные классы каналов фильтрации, предусмотренные стандартом ISO 6487-80 : 60 Герц (граница полосы пропускания 100 Герц), 180 (300), 600 (1000), 1000(1650).
2. Элемент может быть использован для измерения ускорения степени свободы, имеющей ненулевую начальную скорость. Параметр "Начальная скорость датчика" предусмотрен для такого случая, поскольку элемент имеет внутреннюю степень свободы.
3. Внутренняя масса элемента составляет 0.001 г.
|
|
|
AKSEL_1 |
Фильтр низкой частоты для канала измерения ускорений: а) принципиальная схема фильтра; б) амплитудно-частотная характеристика фильтра. Fh – класс частоты канала (Гц); Fn – граница полосы пропускания (Гц). |
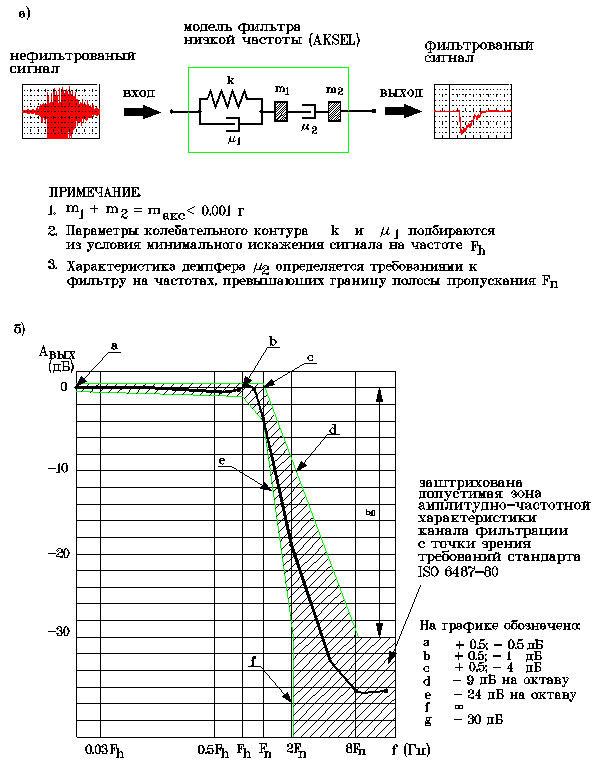
Пример использования
Имеется файл, содержащий данные, полученные в эксперименте, по изменению ускорения от времени. Фрагмент этого файла выглядит следующим образом:
{время } {ускорение}
0.000000, 0.,
0.004778, 0.499847,
0.004875, 0.397838,
0.004973, 0.295829,
0.005070, 0.193820,
0.005168, -0.010198,
. . .
Требуется отфильтровать график ускорений с использованием фильтра, имеющего класс частоты канала фильтрации 60 Гц. После этого нужно получить зависимость скорости и перемещения от времени и перестроить зависимости скорости и ускорения от времени в зависимости этих же величин от перемещения.
Для решения задачи предлагается использовать фильтрующий канал, схема которого изображена на рис. AKSEL_2.
|
|
|
AKSEL_2 |
Структура математической модели устройства фильтрации осциллограммы ускорений, полученной в эксперименте. |
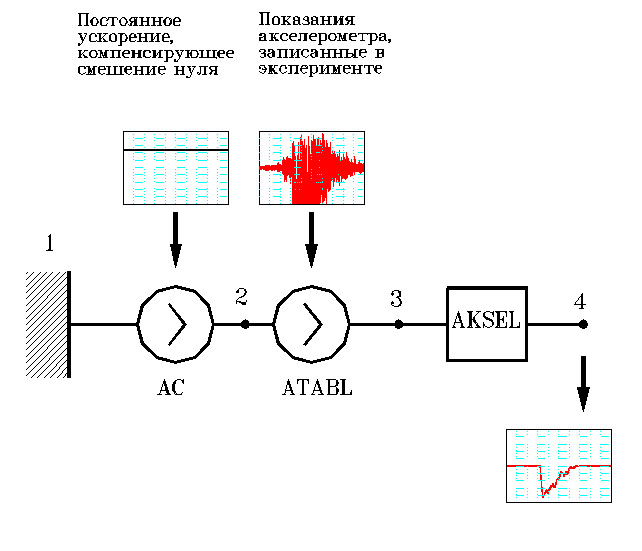
Назначение элементов схемы:
AC - компенсирующий источник ускорения (для уничтожения неточности установки нулевой линии графика ускорений);
ATABL - источник табличной зависимости ускорения от времени, воспроизводящий зависимость ускорений от времени, полученную в эксперименте;
AKSEL - акселерометр со встроенным каналом фильтрации.
Текст задания на PradiSLang:
$ DATA:
Таблица замедлений =
$ INCLUDE: TEST.DAT
Начальная скорость = 5.0
Компенсирующее ускорение = 0
Класс фильтрации = 60
Граница полосы пропускания = 100
$ FRAGMENT :
# BASE : 1
# STRUCT :
Ускорение при испытаниях 'ATABL (3 2;
Таблица замедлений)
Ускорение CONST 'AC ( 2;
Компенсирующее ускорение,100)
Фильтрующий канал 'AKSEL (3 4;
Класс фильтрации,
Граница полосы пропускания,
Начальная скорость)
# OUTPUT:
Ускорение 'X (3";1) {Значения нефильтрованых }
Скорость 'X (3';1) {кинематических показателей }
Перемещение 'X (3 ;1)
Ускорение F 'X (4";1) {Значения фильтрованых }
Скорость F 'X (4';1) {кинематических показателей }
Перемещение F 'X (4 ;1)
$ RUN:
Расчет 'NEWMARK (END=0.3, SCALE=1;
Ускорение, Ускорение F,
Скорость, Скорость F)
$ PRINT:
Фильтр 60 Гц 'ACAD (;
Ускорение = (-5500, 2500),
Ускорение F = ( 0, 2000) )
V и A от S 'ACAD (FROM=1;
Перемещение F = (-0.75, -0.5),
Скорость F = (-100, 100),
Ускорение F)
$END
Пример результатов фильтрации и полученная зависимость ускорения и скорости от перемещения приводятся на рис. AKSEL_3.
|
|
|
AKSEL_3. |
Пример обработки результатов эксперимента: а) исходная и отфильтрованная зависимость ускорения от времени; б) перестроенные зависимости ускорения и скорости от перемещения. |